




























22 Parameter settings
FSE module and safety pulse encoder parameters
Set these parameters when you use a safety pulse encoder in the safety application.
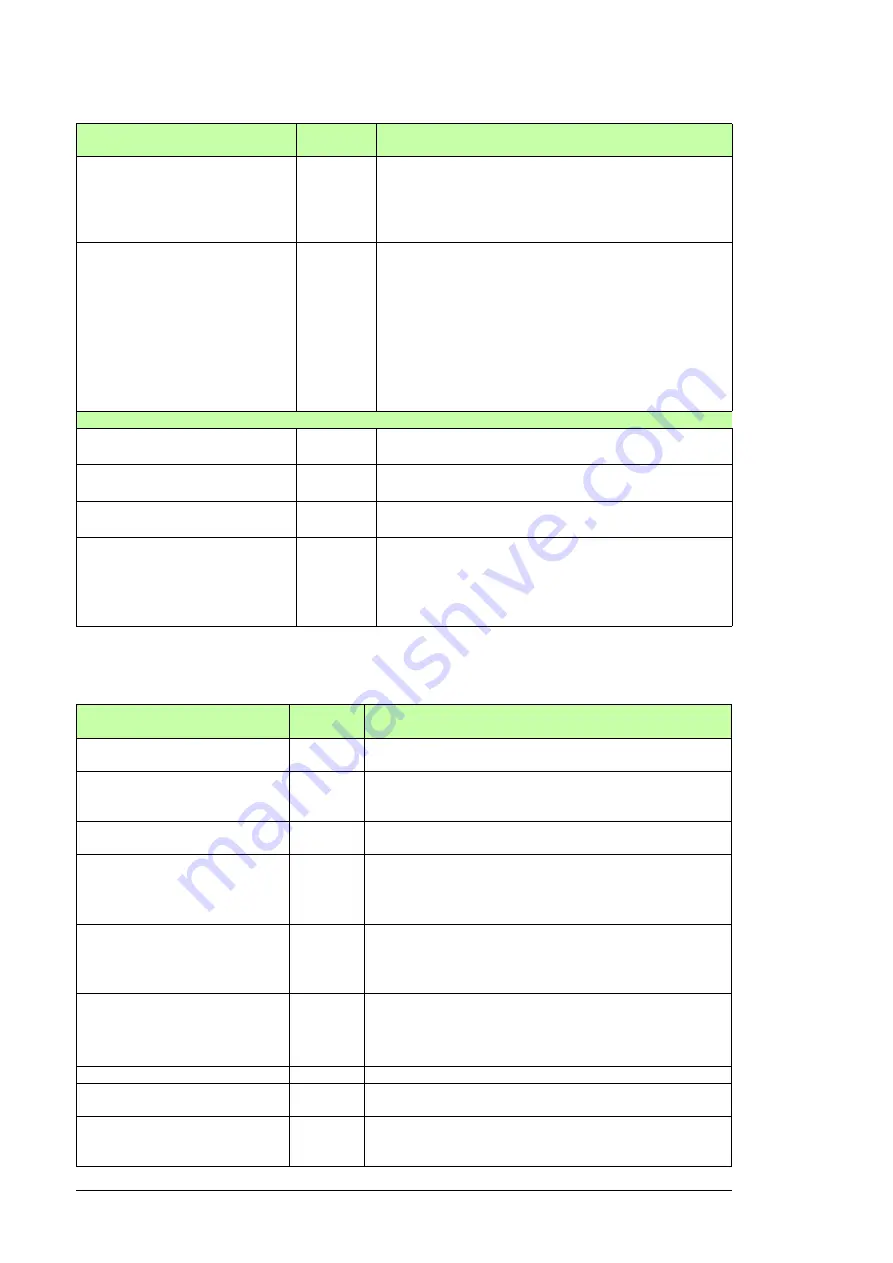
POUS.21
POUS output
None
Sets the digital output that indicates the activity of the
POUS function. Active from the POUS request until the
function has been acknowledged.
The safety function described in this manual does not use
this digital output.
POUS.22
POUS completed
output
DO X113:7 Sets the digital output that indicates the completion of the
POUS function. Active after the time defined by parameter
has elapsed from the POUS request until the
POUS request has been removed and the POUS function
has been acknowledged (automatic acknowledgement is
used, see parameter
).
For the Q950, ABB has configured the POUS
indication signal to this digital output at the factory. Make
sure that this value corresponds to the actual wiring. See
the circuit diagrams of the delivery.
I/O parameters
SAFEIO.35 DI X113:3 Diag pulse
on/off
Off
Sets the diagnostic pulse of digital input X113:3 on or off.
Off
: The input monitors that it does not receive test pulses.
SAFEIO.39 DI X114:3 Diag pulse
on/off
Off
Sets the diagnostic pulse of digital input X114:3 on or off.
Off
: The input monitors that it does not receive test pulses.
SAFEIO.53 DO X113:7 Diag pulse On
Sets the diagnostic pulse of digital output X114:7 on or off.
On
: The output monitors that it receives test pulses
SAFEIO.71 DO X113:7 logic state
Active high Sets the logic state of digital output X113:7.
Active high:
The digital output is on when the indicated
signal is active.
For the Q950, ABB has configured the POUS
indication signal to this digital output at the factory.
Index
Name
Example
value
Description
200.231 FSE 3X act and
par version
Version 1
Activates the FSE-31 encoder interface and shows the
version of the encoder parameter groups (91 and 92).
200.232 Number of
encoders
Single
encoder
CH1
Shows the number of safety pulse encoders connected to the
FSE module.
S_ENCGEN.01 Safe pulse
encoder version
Version 1
Activates the safety pulse encoder and shows the version
parameter group S_ENCGEN.
S_ENCGEN.11 FSE diagnostic
failure reaction
STO
Sets the action taken when there is a problem with the FSE
module.
STO
: The FSO module goes into the Fail-safe mode
and
activates the drive STO function.
S_ENCGEN.14 Enc speed cross
comp tolerance
1 rpm
Sets the encoder speed cross comparison tolerance. This
defines how much the axle speed of the motor can change
within 1 ms.
Adjust the default value to meet the motor in use.
S_ENCGEN.41 Gear numerator
encoder 1
1
Sets the rotation direction for the safety pulse encoder.
With this parameter, you can change the rotation direction of
the motor.
Adjust the default value if necessary.
91.11 Module 1 type
FSE-31
Sets the type of the safety pulse encoder interface module 1.
91.12 Module 1 location 2
Sets the slot in which the safety pulse encoder interface
module 1 is located.
92.01 Encoder 1 type
HTL1
Activates or deactivates the communication with the safety
pulse encoder interface module 1 and sets the type for the
safety pulse encoder.
Index
Name
Example
value
Description
Содержание ACS880 Series
Страница 4: ......
Страница 24: ...24 Parameter settings...
Страница 28: ...28 Start up and acceptance test...
Страница 36: ...3AUA0000145934 Rev E EN 2018 02 02 Contact us www abb com drives www abb com drivespartners...







































































