




























13
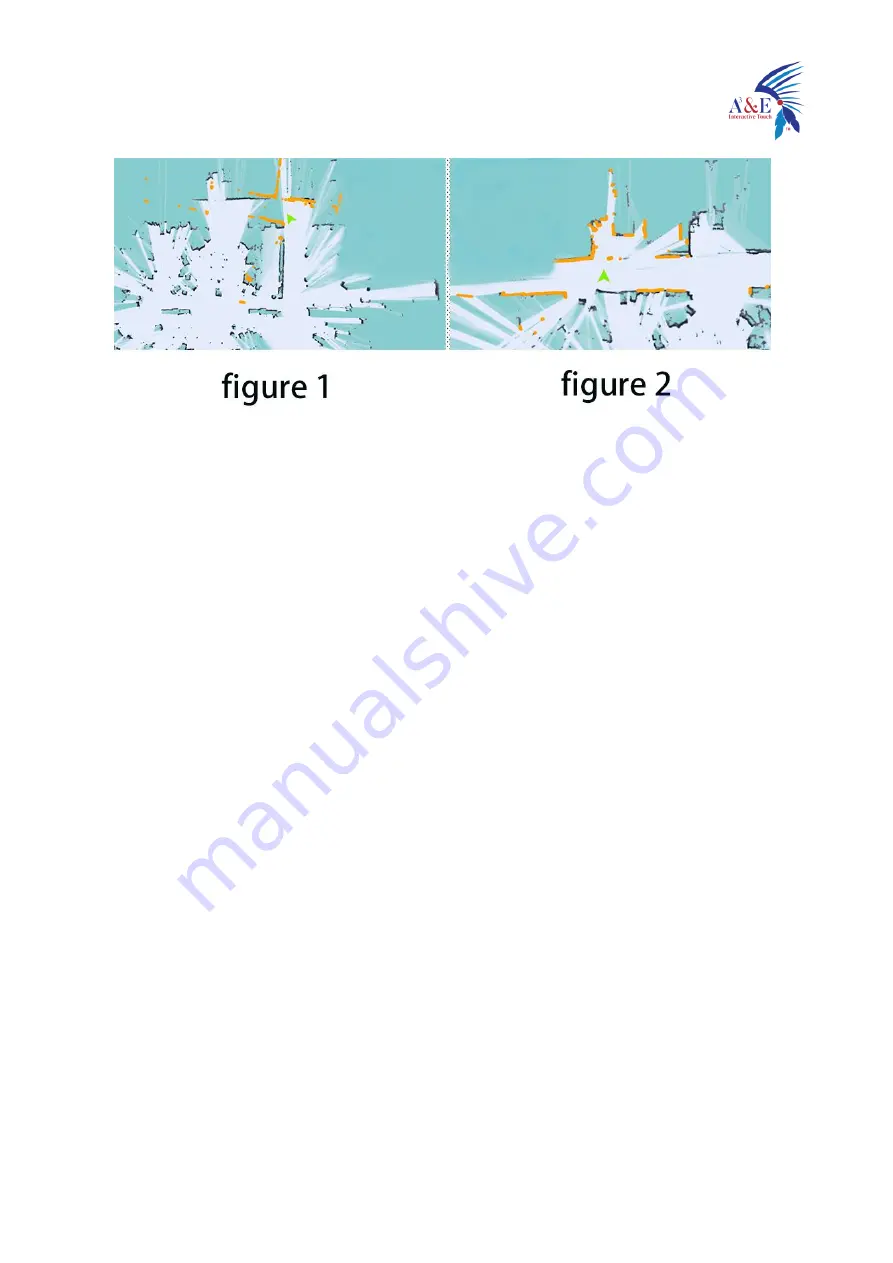
Figure 1:
mismatch between laser and terrain (when the laser does not match the
terrain, stop and wait for the laser to match the terrain before pushing the robot
to build the map)
Figure 2:
matching of laser and terrain (some areas need robot to turn to be able
to scan clearly, such as wide terrain and room)
4. Do not move the machine after the machine reaches the end point. Just
observe whether the map is clean, without ghosting and matches the actual
terrain. If there is no obvious dislocation, click "composition completed". If there
is any dislocation, please wait for a period of time, and the algorithm will correct
it.If the correction is not successful in 10 minutes, consider rebuilding the map.
matters needing attention:
1.
Select the place with obvious feature points and clean terrain as the starting
point and end point, and scan the surrounding environment in a slow circle at the
beginning.
2. When pushing or controlling the robot, walk slowly and observe whether the







































































