


















◆
Improper installation of the controller may result in misoperation, failure and fire.
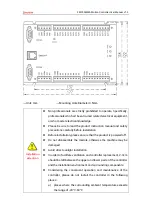
Wiring
Danger
◆
The specifications and installation methods of the external wiring of the
equipment shall comply with the requirements of local power distribution
regulations.
◆
When wiring, all external power supplies used by the system should be
disconnected before operation.
◆
When powering on and running after the wiring work is completed, the terminals
attached to the product must be installed.
◆
Cable terminals should be well insulated to ensure that the insulation distance
between cables will not be reduced after the cables are installed on the terminal
block.
Notice
◆
Avoid metal shavings and wire ends falling into the hardware circuit board during
installation.
◆
The cable connection should be carried out correctly on the basis of confirming
the type of the connected interface.
◆
It should be confirmed that the cables pressed into the terminals are in good
contact.
◆
Do not bundle the control wires and communication cables with the main circuit
or power supply wires, etc., and the distance between the wires should be more
than 100 mm, otherwise noise may cause malfunction.
◆
If the controller is not installed properly, it may cause electric shock or equipment
failure or malfunction.
Summary of Contents for ZMC004WEA
Page 1: ......







































































