





























ZMC004WEA Motion Controller User Manual V1.5
→
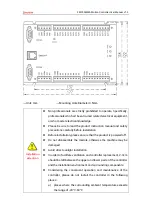
Wiring Notes:
⚫
As above, the daisy chain topology is used for wiring, so the star topology cannot be
used. When the use environment is ideal and there are few nodes, the branch
structure can also be considered.
⚫
Please connect a 120Ω terminal resistor
(when there is one to one connection or the
number of slave stations is few and the wiring is relatively short, the terminal resistor
can not be added) in parallel at the two ends of the CAN bus to match the circuit
impedance and ensure communication stability.
⚫
Please be sure to connect the common terminal of each node on the CAN bus to
prevent the CAN chip from burning out.
⚫
Please use twisted-pair shielded wires, especially in harsh environments, make sure
the shielding layer is fully grounded.
⚫
On-site wiring should also pay attention to the distance between strong current and
weak current wiring, it is recommended to be more than 20cm.
⚫
It should be noted that the equipment grounding (chassis) on the entire line must be
good, and the grounding of the chassis should be connected to the standard factory
ground pile.
→
Cable Requirements:
Summary of Contents for ZMC004WEA
Page 1: ......







































































