



























Page | 32
LOAD ROBOTIQ FILES & VERIFY I/O ALLOCATION
Predetermined names for the allocated external I/O reserved for the Robotiq 2F gripper can be loaded
onto Smart Pendant using the File Transfer utility from the Main Menu. A sample job file to operate the
Robotiq gripper is also provided as a reference.
WARNING: Performing the steps below will OVERWRITE any existing I/O names already on
Smart Pendant. Export the existing IONAME.DAT file from Smart Pendant to merge its contents
with the Robotiq 2F IONAME.DAT file using an appropriate application (e.g. WinMerge).
Load IONAME.DAT Instructions
1.
Load YASKAWA supplied IONAME.DAT and ROBOTIQ-2F.JBI files onto the root folder of a USB
storage device for the applicable SMART Series controller (YRC1000 or YRC1000micro)
2.
Insert USB storage device into Smart Pendant (bottom-right)
3.
Change the Smart Pendant Mode to “Teach” and the Security Level to “Management” (999999)
4.
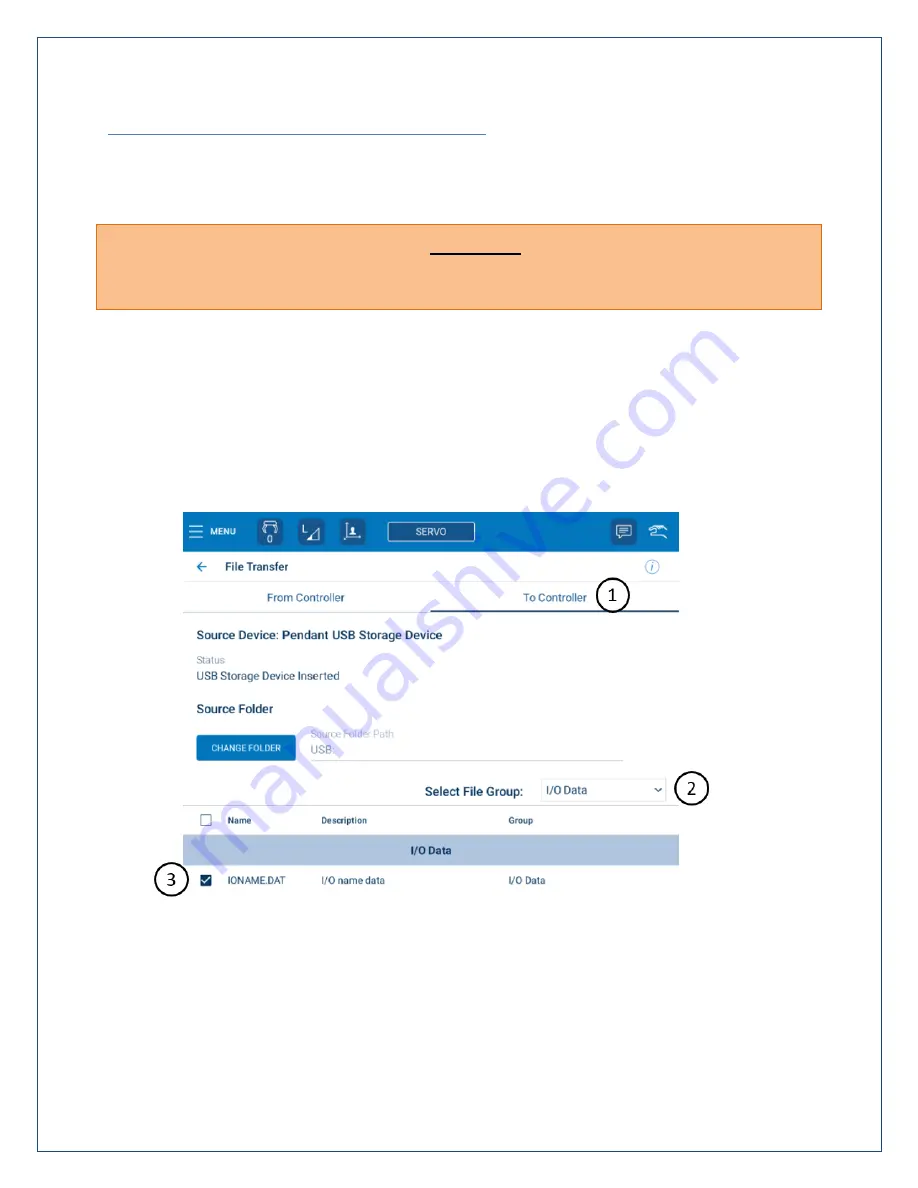
Navigate to the file transfer screen {Utility} → {File Transfer} from the Main Menu
①
Select {To Controller} as the File Destination
②
Select {I/O Data} as the File Group
③
Select checkbox adjacent to “IONAME.DAT”