





























Page | 20
ETHERNET/IP CONFIGURATION ON SMART SERIES CONTROLLER
A SMART Series robot controller can be configured as either an EtherNet/IP Adapter or Scanner.
Configuring the controller as an Adapter allows a connection to be established with another controller
and is most often used to communicate with PLCs. Configuring the controller as a Scanner allows it to
communicate with peripheral devices (e.g. Robotiq 2F gripper) using EtherNet/IP. When in Scanner
mode, a single controller can control multiple adapter devices.
For this application, the robot controller will be configured as a Scanner using Software Pendant. This
article will assume a basic knowledge of connecting Software Pendant, booting in Maintenance Mode,
changing Security Level (see Chapter 12 of the “Smart Pendant Instructions” manual).
Configuration Information for Scanner
Before opening Software Pendant, it is important to gather all the necessary information required to
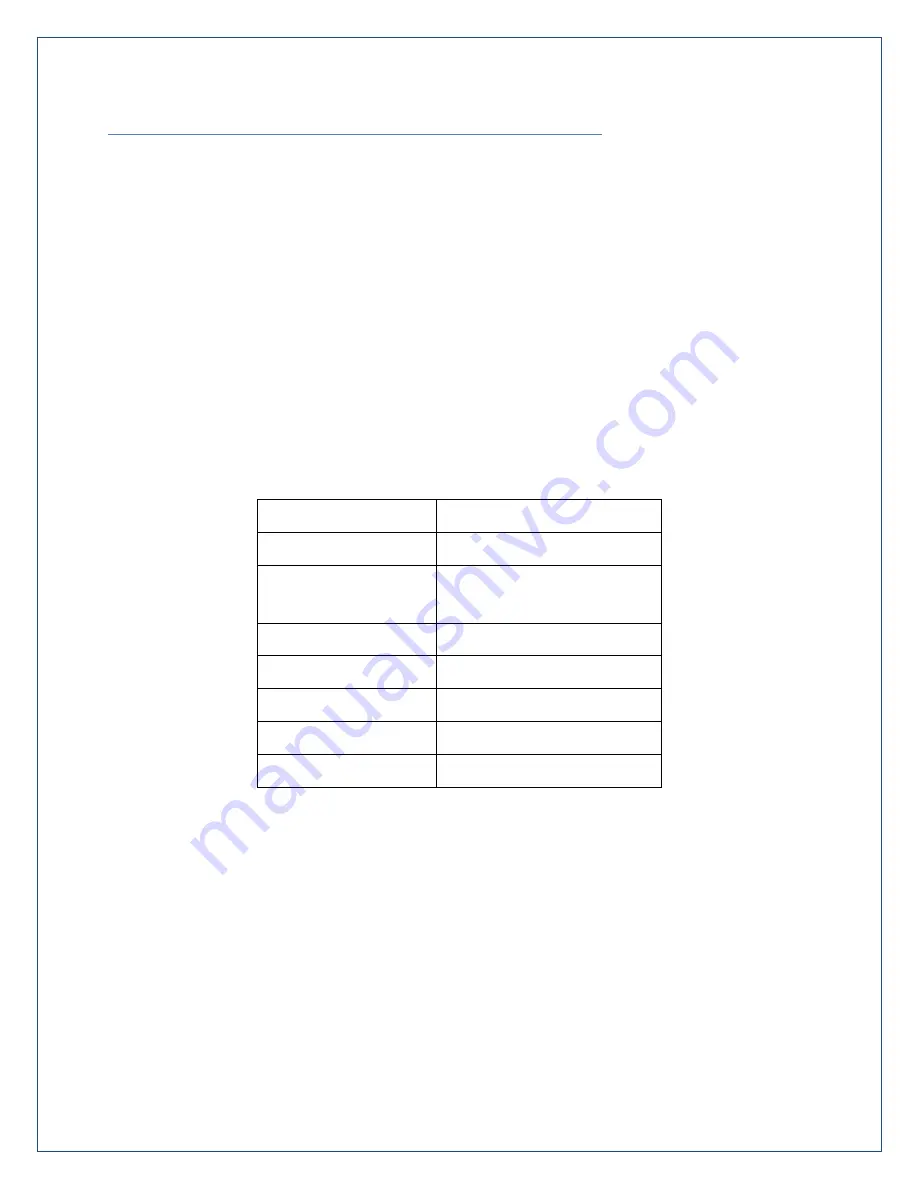
communicate with the gripper. The table below shows the information needed to properly configure a
Scanner. This information (and more) is available in the Robotiq 2F gripper manual.
Name
User Defined (e.g. Robotiq 2F)
IP Address
User Defined
Input Size
24 byte
(20 g 4 EIP header)
Output Size
20 byte
Configuration Size
0 word
Input Instance
101
Output Instance
100
Configuration Instance
1
Configure the Scanner using Software Pendant
The data gathered above can now be entered using Software Pendant on the Development PC. Connect
to the robot controller in Maintenance Mode and switch to “Management” Security Level. Navigate to
{SYSTEM} → {SETUP} → “Option Function” → “EtherNet/IP (CPU Board) : DETAIL” from the Main Menu
to begin this process.
From this screen, the Robotiq 2F gripper should be added to the Device Information List. Highlight
“Device Information List : DETAIL” and press {SELECT} (or double click using a mouse).