





















6 MECHATROLINK Option Drive Parameters
YASKAWA ELECTRIC
TOBP C730600 49A V1000 Option MECHATROLINK-II Installation Manual
23
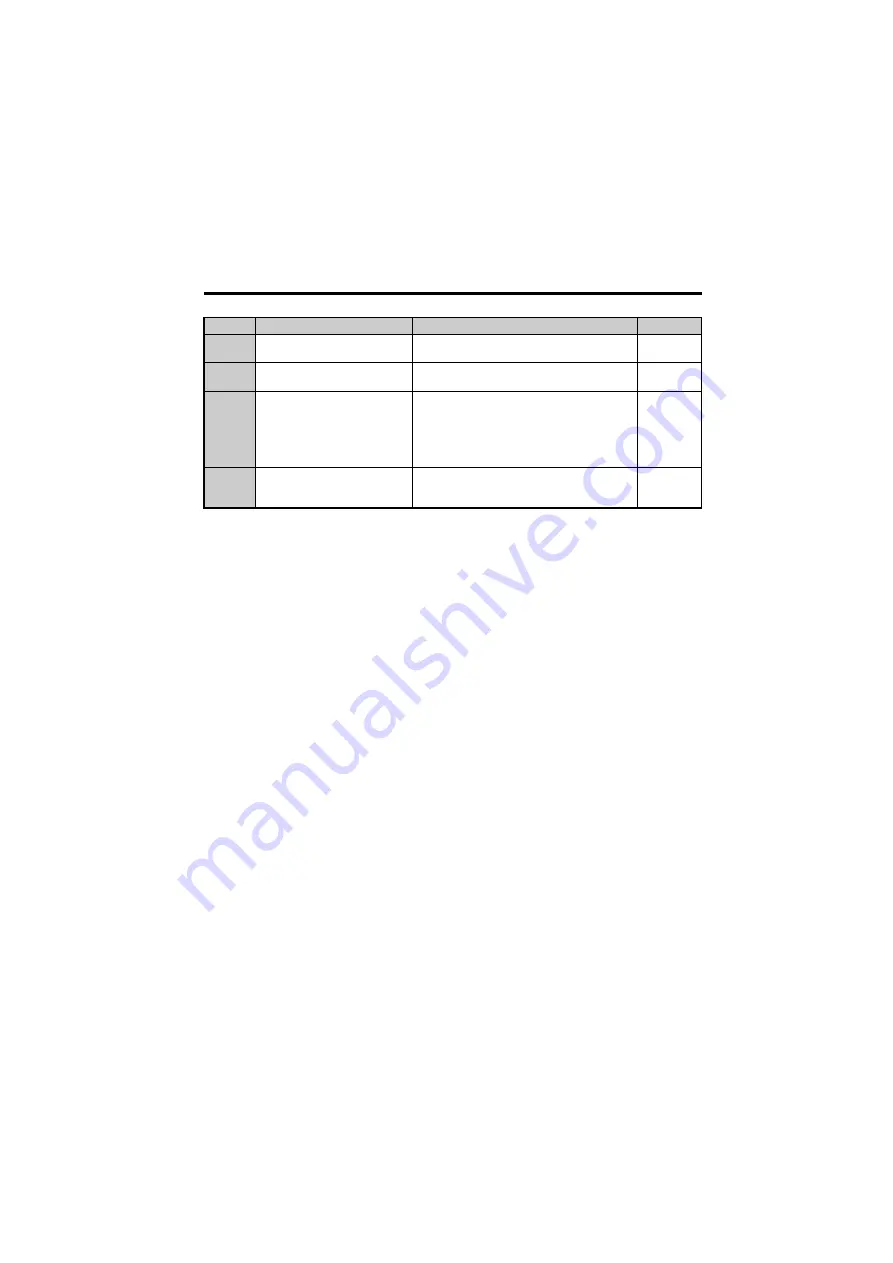
F6-23
MECHATROLINK Monitor
Selection (E)
0 to FFFFH
0
F6-24
MECHATROLINK Monitor
Selection (F)
0 to FFFFH
0
F6-25
Operation Selection at Watchdog
Error (E5)
0: Ramp to stop. Decelerate to stop using the
deceleration time in C1-02.
1: Coast to stop.
2: Fast Stop. Decelerate to stop using the
deceleration time in C1-09.
3: Alarm only.
1
F6-26
MECHATROLINK bUS Errors
Detected
Sets the number of option communication errors
(bUS).
2 to 10
2
<1> To start and stop the drive with the MECHATROLINK master device using serial communications, set b1-02 to 3.
To control the frequency reference of the drive via the master device, set b1-01 to 3.
<2> If set to 3, then the drive will continue to operate when a fault is detected. Take proper measures such as installing
an emergency stop switch.
<3> Power must be cycled in order for any setting changes to take affect.
<4> All station addresses must be unique. If set to 20 or 3F, a Station Address Error (AEr) will occur and the ERR light
will turn on.
<5> Setting byte 10 of INV_CTL to 0EH enables the register set by F6-23. Byte 11 and 12 of the response data enable
the register content set by F6-23.
Refer to the SI-T3/V Technical Manual for detail.
<6> Setting byte 10 of INV_CTL to 0FH enables the register set by F6-24. Byte 11 and 12 of the response data enable
the register content set by F6-24.
Refer to the SI-T3/V Technical Manual for detail.
No.
Name
Description
Default





















































