





























2.
Resume to default setting
(
F0-01
)
Set F0-01=1 when enabler is shut down, press ENTER to resume to default settings, no need to cut
power.
3.
Clear the position offset
(
F0-02
)
Set F0-02=1 to clear the offset.
4.
Clear up historical alarm records
(
F0-04
)
Set F0-04=1 can clear up historical alarm records from U1-14 to U1-53.
5.
Panel inertia identification
(
F0-07
)
Refer to panel inertia identification operation steps chapter 6.2.4.
6.
Panel external instruction auto-tuning
(
F0-08
)
Refer to external instruction auto-tuning chapter 6.4.5.
7.
Panel internal instruction auto-tuning
(
F0-09
)
Refer to internal instruction auto-tuning chapter 6.4.4.
8.
Panel vibration suppression
(
F0-10, F0-11
)
Refer to vibration suppression chapter 6.7.3.
9. Panel vibration suppression (F0-12)
Refer to vibration suppression chapter 6.7.6.
4.4.2 Group F1
Function
code
Description
Function
code
Description
F1-00
Jog run
F1-05
Software enable
F1-01
Test run
F1-06
Reset turns of absolute encoder
F1-02
Current Sampling Zero-correction
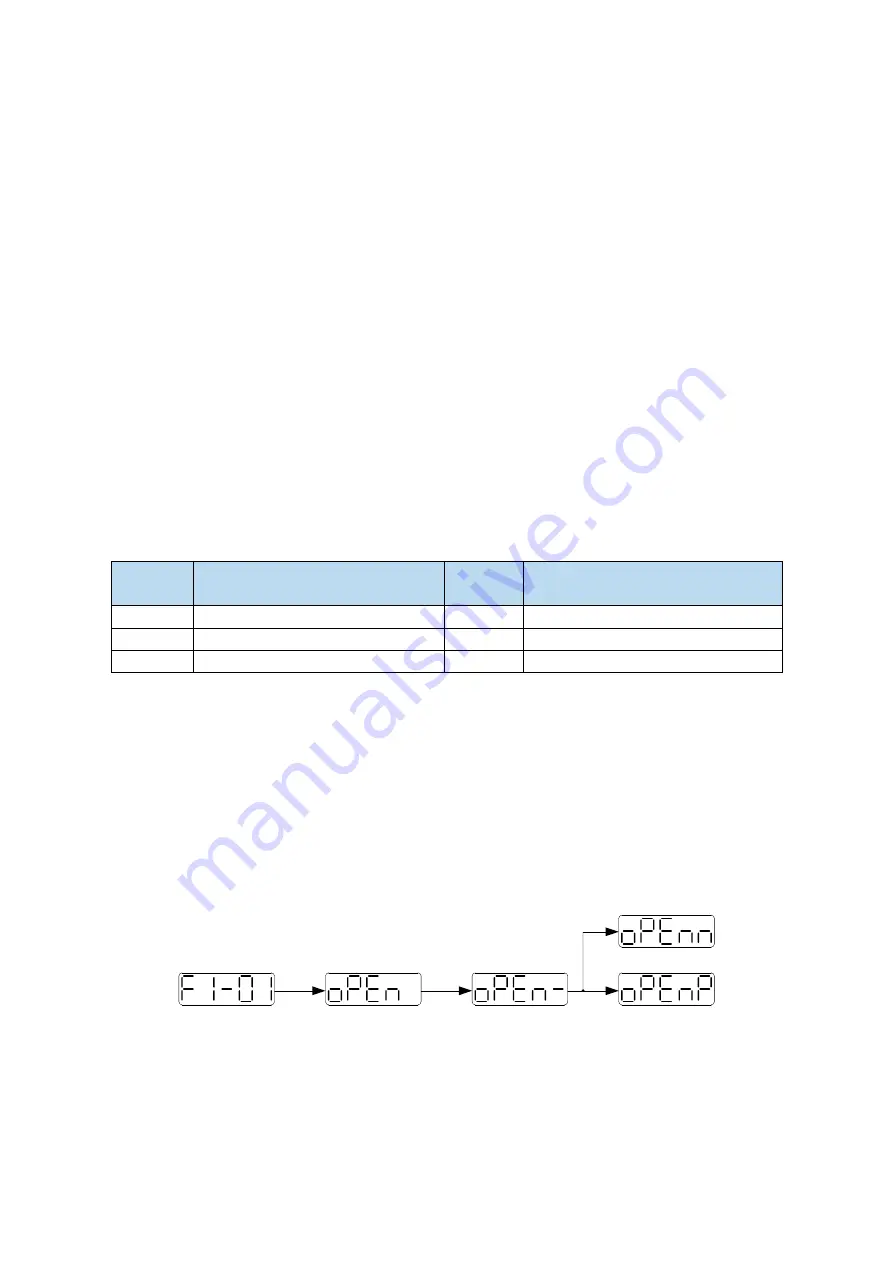
1.
Test run (F1-01)
Before entering the test run mode, please confirm that the motor shaft is not connected to the
machine!
When the servo driver is connected to the non-original encoder or power cable, it should first enter
the test run mode to verify that the encoder terminal or power terminal is connected correctly.
Test run mainly checks the power cable and the encoder feedback cable to determine whether the
connection is normal. According to the following operation, the motor can normally achieve forward
and reverse rotation. If the motor shaft shakes or driver alarms, please immediately disconnect the
power supply, and re-check the wiring situation.
Long press
ENTER
Short press
ENTER
DEC
INC
2. Jog run
(
F1-00
)
Before entering the jog run mode, please confirm that the test run is normal when the motor is empty,
so as to confirm that the servo connection is correct.
Jog run mode requires the driver to be idle in bb status!
Starting with the 3700 firmware version, the jog run function changes from position mode to speed
mode. The acceleration and deceleration time is controlled by P3-09 and P3-10.
Summary of Contents for DS5L1 Series
Page 1: ...DS5L1 series servo driver User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 05 20200929 1 0 ...
Page 2: ......
Page 6: ......
Page 100: ...3 Set the auto tuning interface 4 Click ok to start inertia identification ...
Page 106: ...3 set the auto tuning interface ...
Page 112: ...with higher rigidity 6 Start auto tune 7 Open the servo enable then click ok ...
Page 169: ...Appendix 9 Torque speed characteristic curve ...
Page 170: ......





















































