


























Description of the servo actuator
TPM
+
en-12
4022-D018396
Revision: 07
3.2
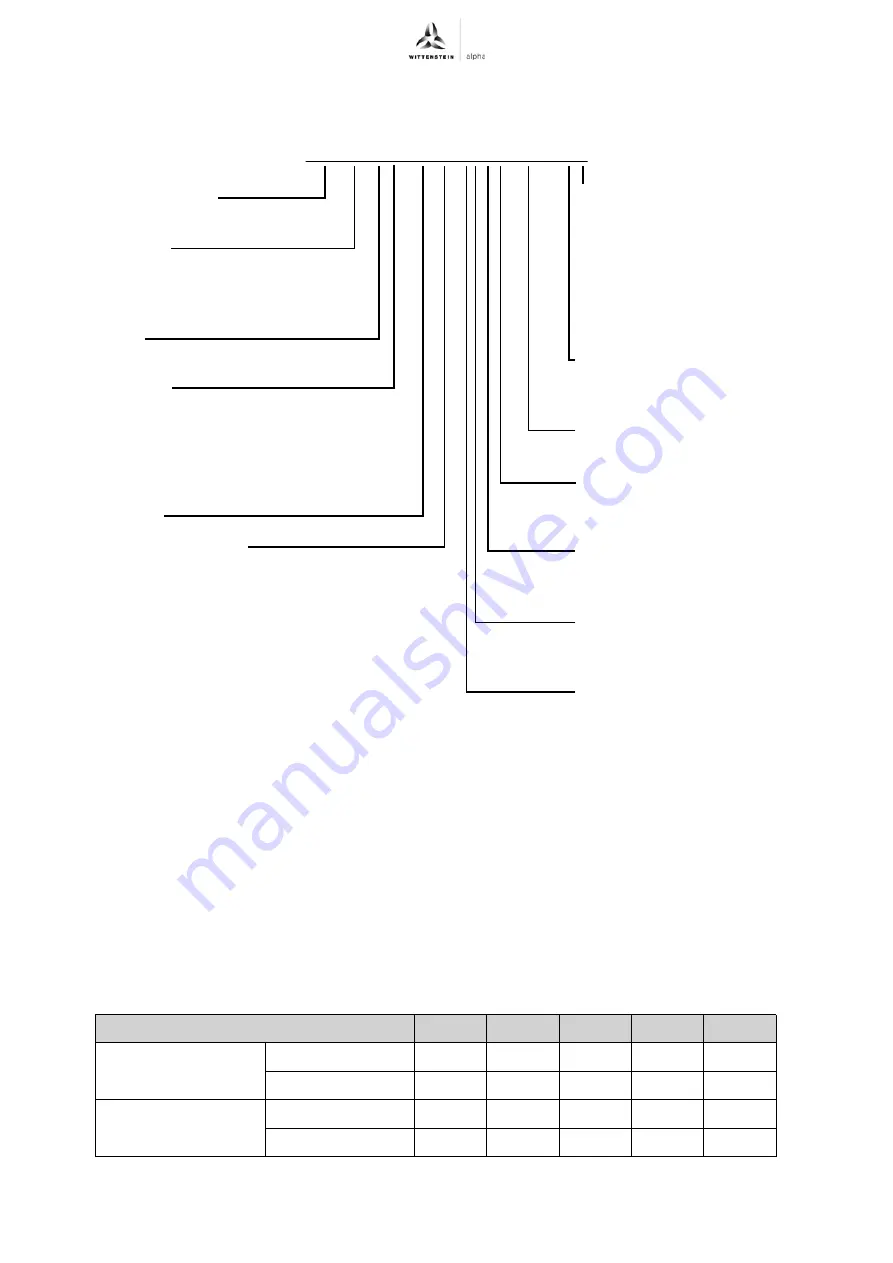
Ordering code
3.3
Performance statistics
Refer to Chapter 9.4 "Technical specifications" for the maximum permitted speeds and torques.
3.4
Weight
The standard weights of the servo actuators are specified in the tables "Tbl-2", "Tbl-3" and "Tbl-4"
(with resolver, without brake). Depending on the design, the actual dimension can deviate by up to
20 %.
3.4.1 Weight TPM
+
dynamic
Size TPM
+
004
010
025
050
110
Without brake [kg]
i = 16 –31
2.2
4.8
8.5
18.5
37.1
i = 61 –91
2
4.3
7.1
14.7
35.9
With brake [kg]
i = 16 –31
3
5.3
9.8
23.7
39.6
i = 61 –91
2.7
4.9
8.4
16.2
38.3
Tbl-2: Weight [kg]
Actuator type
TPM
Version
_ = dynamic
A = high torque
P = power
Size
004/010/025/050/110
Version
S = Standard UL
G = Grease filling
F = Food-grade lubrication
X = Special design
P = Welded pinion
Ratio i
Feedback system
R = Resolver 2-pole
S = Singleturn absolute encoder, EnDat
M = Multiturn absolute encoder, EnDat
N = Singleturn absolute encoder, Hiperface
K = Multiturn absolute encoder, Hiperface
T = 5V-TTL -Incremental encoder with
Hall-signal
E = Singleturn absolute encoder,
Rockwell compatible
V = Multiturn absolute encoder,
Rockwell compatible
I =
Incremental encoder, optical
Pin configuration
1 = Standard, temperature
sensor over signal
cable
4 = Temperature sensor
over power cable
5 = Rockwell compatible
6 = B&R compatible
Electrical connection
W = Angular mounting box
G = Mounting box, straight
Motor size and stator
length
Backlash
1 = Standard
0 = Reduced
Brake
B = with brake
O = without brake
Temperature sensor
P = PTC
K = KTY
DC bus voltage
5 = 320V
6 = 560V
TPM 010S-100R -6PB1-055A-W1
Summary of Contents for TPM dynamic
Page 1: ...4022 D018396 07 4022 D018396 Revision 07 TPM dynamic high torque power Operating Manual ...
Page 44: ...Appendix TPM en 44 4022 D018396 Revision 07 Option N and K signal pin assignment 1 ...
Page 45: ...TPM Appendix Revision 07 4022 D018396 en 45 Option S and M signal pin assignment 1 ...







































































