









Copyright © Dr Robot Inc. 2006
7
III.
Procedure to upgrade the PMB5010 firmware
1.
Download and save the latest PMB5010 firmware from www.DrRobot.com
2.
Turn off PMB5010 and keep it off until step 9
3.
Use a null modem cable to connect the PC to PMB5010. All peripheral modules (e.g. LCD and etc.) can
still be plugged to the PMB5010 without affecting the upgrade process
4.
Close all WiRobot software on PC (e.g. WiRobot Gateway and all sample applications)
5.
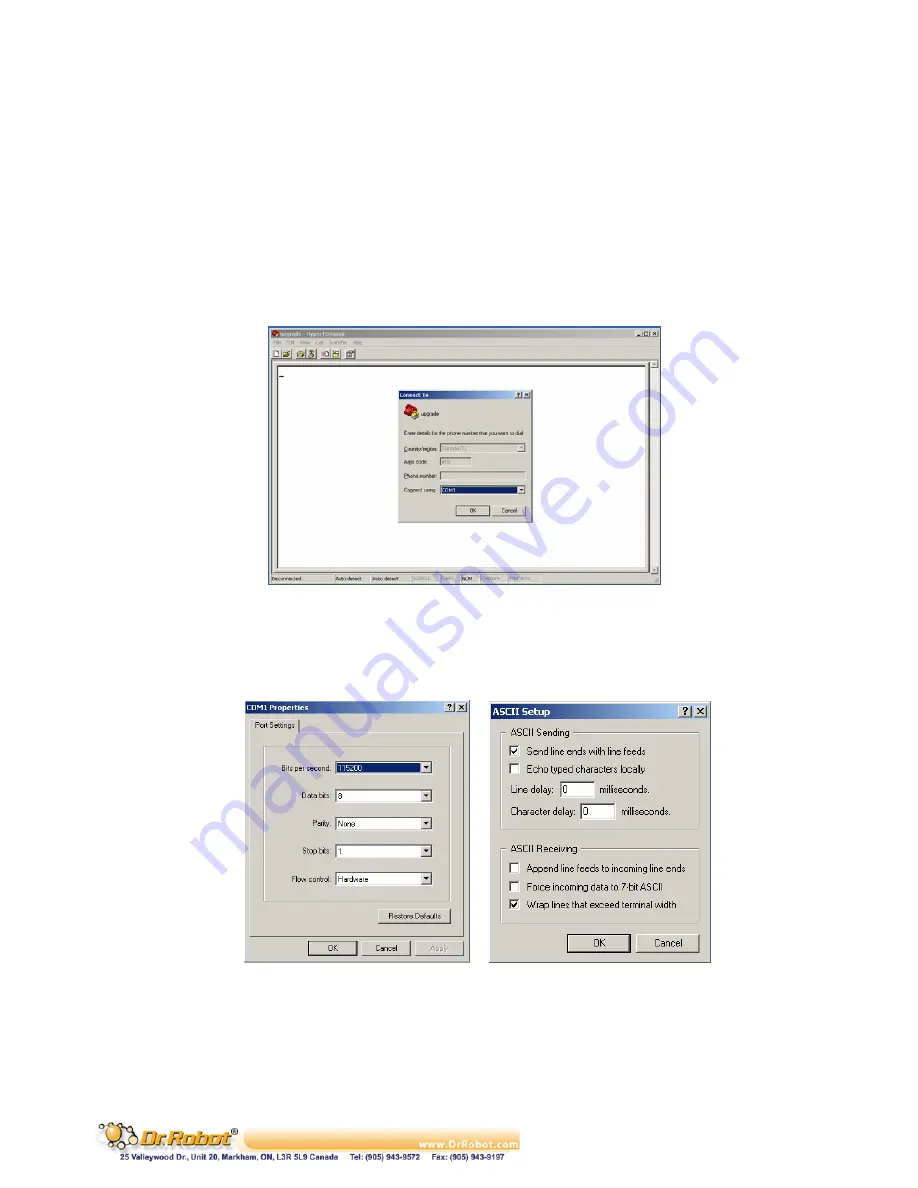
Start the hyper-terminal (which come with MS Windows OS), give a name to this new connection and
choose the COM port that is connected to the PMS5005 (normally COM1 or COM2) as shown in the
following figure:
Figure III.1 Choosing COM Port Connection
6.
Configure the COM port with the setting 115200, 8, N, 1, Hardware and turn on “Send line ends with
line feeds” under Properties - > Settings -> ASCII Setup,
Figure III.2 COM Port Setting
7.
The lower left corner of the hyper-terminal will show the connection status. If the hyper-terminal is still
not connected, click the connect icon on the hyper-terminal to establish the connection (don’t turn on
the PMB5010 yet!).