




















12
EN
GL
ISH
TM
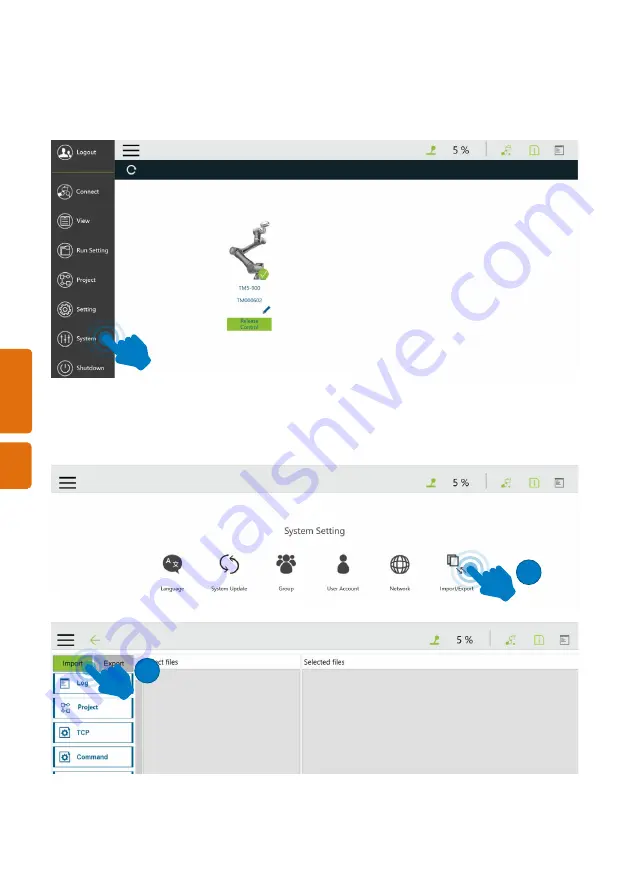
10.2 Installation on the robot
Select the menu item "System" in the user interface of the robot system, to access the
system settings.
To import the function blocks from the USB flash drive tp the robot system, select
import/export in the system settings. To import the function blocks, follow the steps
below:
1
2
Summary of Contents for GRIPKIT CR EASY
Page 15: ...13 DEUTSCH TM 3 4 5 6 7...
Page 22: ...INSTRUCTION MANUAL GRIPKIT CR EASY...
Page 35: ...13 ENGLISH TM 3 4 5 6 7...
































































