

















ZED-F9R - Application note
UBX-22035176 - R01
Contents
Page 27 of 30
C1-Public
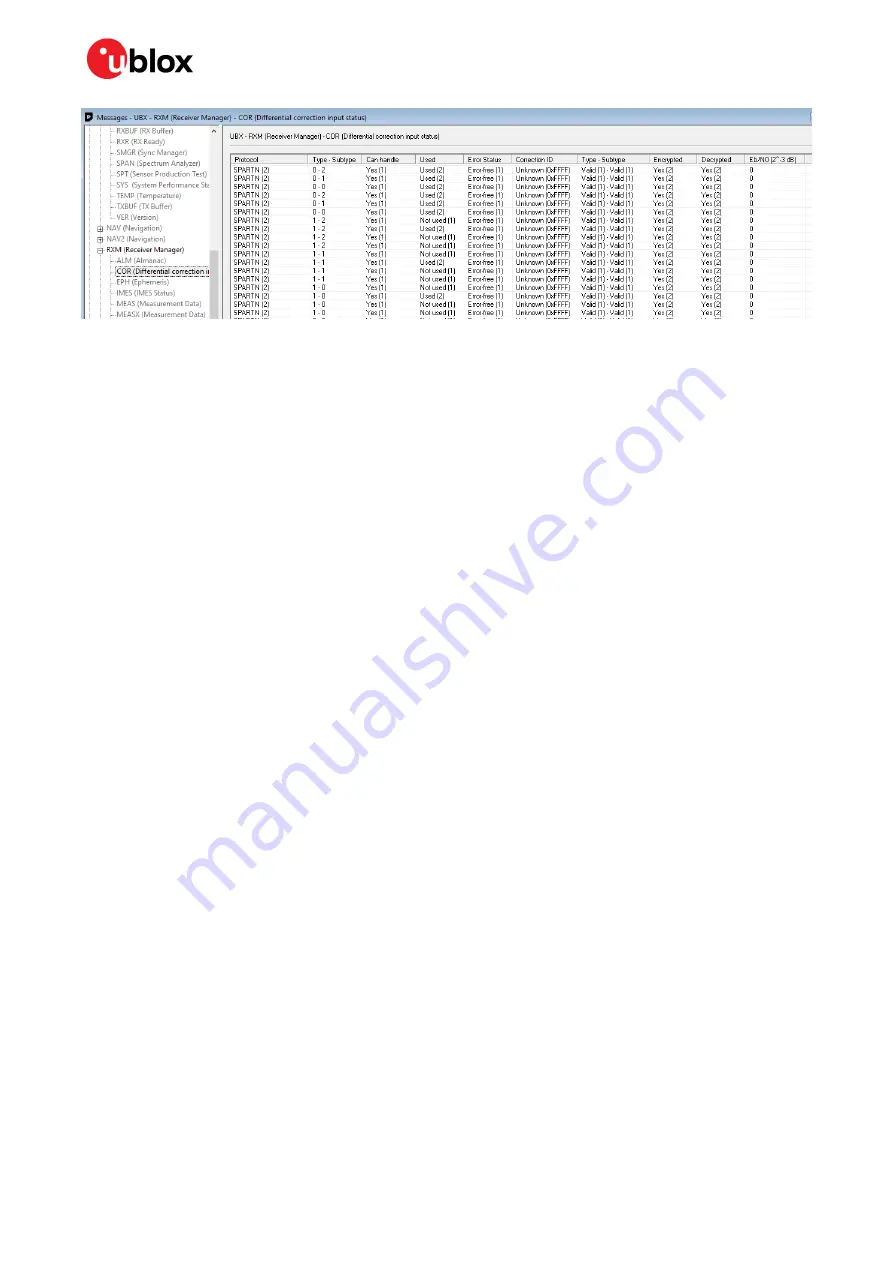
Figure 22: u-center UBX-RXM-COR showing SPARTN messages being used and decrypted
A.5
Basic alignment & position offset checks
There are few drive tests to see whether lateral and longitudinal offsets are an issue.
•
On a flat surface, drive in a straight line, turn around and return to the same spot. If there is an
unacceptable offset between the out and back track, advanced configuration is needed.
•
On a flat surface, stand still for one minute, drive in a straight line and turn around and return to
the same spot where the rear wheels are in the same location, standstill for one minute. If there is
an unacceptable offset between the large group of readings resulting from the standstill at the
beginning and the large group of readings at the end, advanced configuration is needed.
There are few drive tests to see whether there are misalignment issues.
•
On a flat surface, drive in a straight line for one minute and then turn left and drive in a straight
line. If the mounting of up versus down, this will trigger a sensor fusion reset.
•
On a flat surface, at constant speed, drive in a 2 m straight line, perform a smooth turn of arc length
of 1 m to the right and continue straight. The recordings during the turn should be smooth without
sawtooth like patterns. Repeat for a left turn. If the sawtooth patterns are always on the side of
the arc for both turn or are always on the outside for both turns, there is a misalignment along the
horizontal axis.
A.6
Odometry data issues
The following are some more rare issues with odometer data:
•
Does the rollover value of the odometer data not fall at the powers of two (2
n
-1)? E.g., 1023, 2047,
4095, etc. The rollover point needs to be configured with CFG-SFODO-COUNT_MAX.
•
Does the vehicle travel at such a high speed that the values rollover more than once between two
samples? The values need to be scaled to a smaller value while meeting the minimum resolution of
the odometer data.
A.7
RTK never reaching fix
What are some of the common causes for not getting an RTK fix in open sky even though
corrections are being received by the receiver?
•
For a VRS service, are the RTCM messages compatible with the receiver? This can be checked by
inspect the documentation of supported messages or by reviewing the message UBX-MON-COR
•
For a Nearest station RTCM service, is the reference station close enough?
•
Is the quality of the service good?
•
For an SSR service, are the messages being decrypted?
•
Is the service having some kind of outage?
•
Does the service work with an ANN-MB antenna?







































































