




























TMCM-1260 Hardware Manual • Hardware Version V1.10 | Document Revision V1.20 • 2018-05-17
16 / 30
33pF
22k
10k
2k2
+3V3
microcontroller
microcontroller
ENC_A,
ENC_B
+5V
TMCM-1260
or
+5V
pull-up
enabled
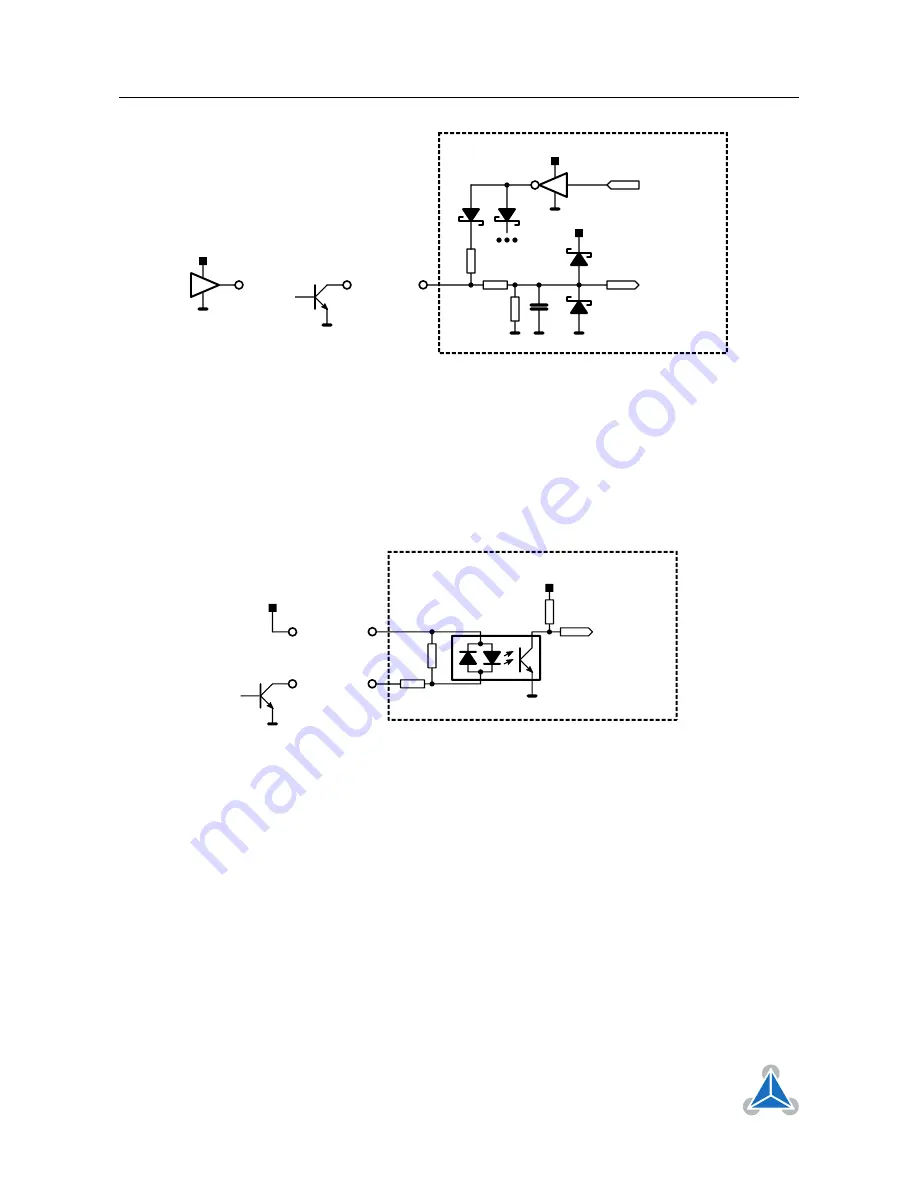
Figure 8: External encoder input
7.5 Step/Direction inputs
The TMCM-1260 may be used as driver with an external motion controller. In this case the Step/Direction
output signals of the external motion controller may be connected to the optically isolated Step/Dir inputs
of the TMCM-1260. Please note that these signals should be 24V signals. For lower voltage signals a simple
small signal transistor maybe inserted as level converter.
680
6k8
2k2
+3V3
microcontroller
TMCM-1260
STEP,
DIR
ISO_COM
+24V_ISO
GND_ISO
Figure 9: Step/Direction input
Due to limitations of the opto-isolators the maximum step frequency of these inputs is limited to around
20kHz. For higher motor speed the step interpolator of the driver stage should be activated or the
microstep resolution reduced (default 256 microsteps per fullstep).
©2018 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at
www.trinamic.com







































































