





























STORMBEE Software User Manual
–
Think 3D BVBA
Version N°1.1, last modified 30/09/2018
39
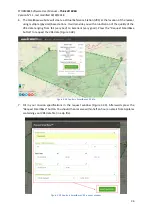
Expand “Solution Status” and inspect “Number of GPS Satellites” and “Number of GLONASS Satellites”
Figure 3.45 Applanix quality control display plot number of satellites
3.3.4.4
Lever Arm settings
The position and attitude of the IMU (inertial measurement unit) with respect to the GPS is very
important. An error in these values will cause the final calculated trajectory to be offset by the lever
arm error amount. This value was measured by Think3D
–
STORMBEE and is automatically saved into
the Applanix raw trajectory log file. An example of these lever arm errors is shown in Figure 3.46.
3.3.4.5
Position Dilution of Precision (PDOP)
Quality check: optional
PDOP describes error caused by the relative position of the GPS satellites. The more signals a GPS
receiver can “see” (spread apart across the sky versus flying close together), the more precise it can
be. An average value of below 3 is suggested to be adequate (Figure 3.47). Spikes may occur, but if
they are kept to a minimum they should not be of concern. In general, lower values are preferred. The
user can not greatly affect this value by altering processing methods, but knowledge of less accurate
regions can alert the user to the need to be more careful in future processing steps.
Expand “Solution Status” and inspect “PDOP” (




























































