
























14
@2021 Swellpro Technology Co., Limited
2.
Before every flight in a new area.
3.
After maintenance.
4.
The distance from the last calibration area is more than 100M.
5.
The aircraft is subject to strong magnetic interference.
6.
The aircraft has been impacted or vibrated violently.
7.
Then hovering in GPS mode, the aircraft has wobble or large drift.
8.
The remote control prompts "warning compass error calibrate compass".
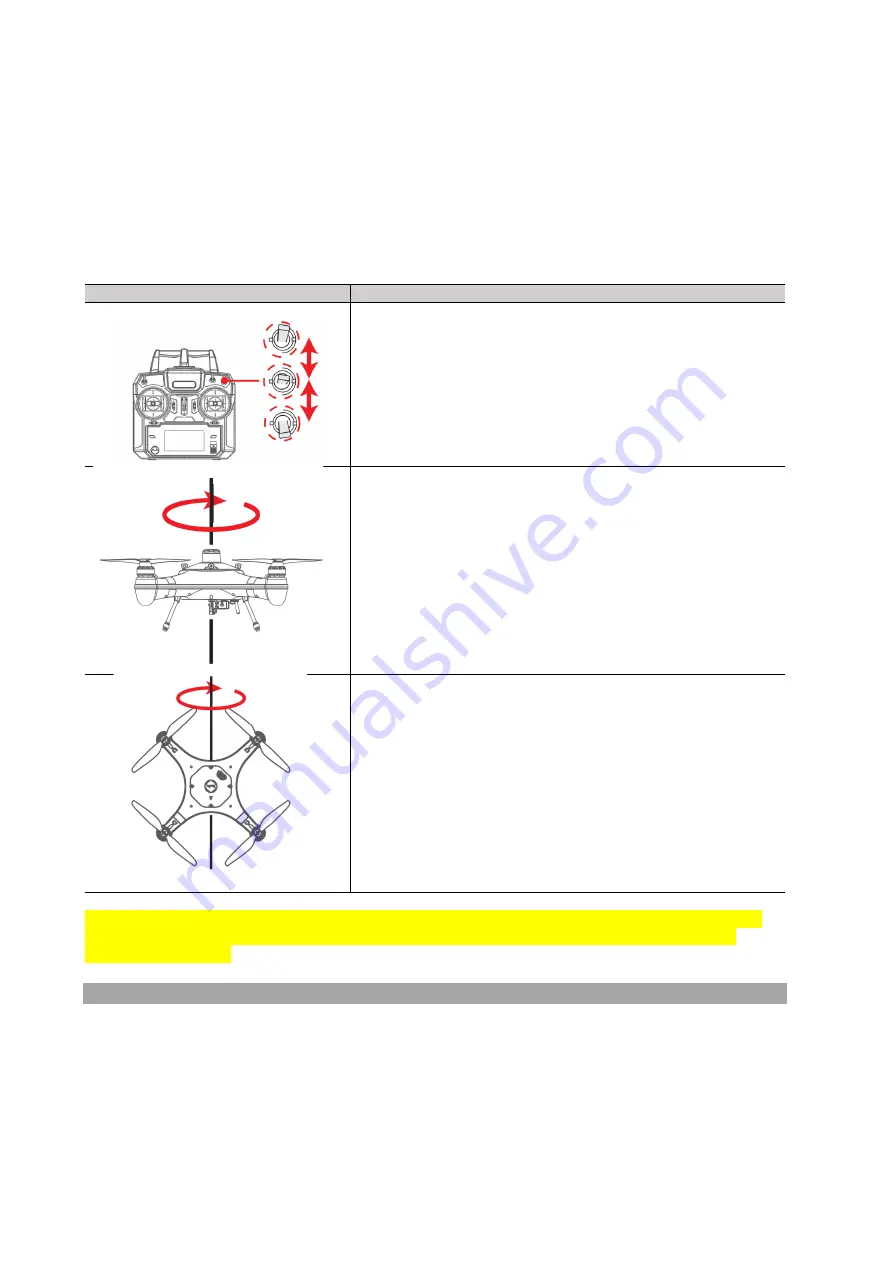
How to calibrate:
Remote Control Operation
Description
1. Place the aircraft horizontally, turn on the remote control and
the aircraft in turn, and wait for the aircraft to complete the self-
test. Quickly switch the flight mode paddle, when the green light
of the rear arm flashes quickly, or the remote control display
screen prompts "compass calibration rotate the aircraft
horizontally", the system will enter the calibration state.
2. At this time, pick up the aircraft horizontally, rotate it
clockwise for about 2-3 turns until the green light of the rear
boom flashes slowly, or the remote control screen prompts
"compass calibration rotate the aircraft vertical", and then enter
the head to rotate vertically and downward to calibrate.
3. Turn the nose
down
vertically and clockwise for about 2 ~ 3
turns until the remote control displays "warning aircraft
initializing, please wait". Place the aircraft horizontally and keep
it still for about 30 seconds. When the prompt "warning aircraft
initializing, please wait." on the remote control display
disappears, the calibration is successful. Please restart the
aircraft.
Compass calibration needs to be carried out outdoors. Do not calibrate in strong magnetic field area,
near large metal objects (ie. Car), wireless, cellular Antenna’s or WIFI or near mobile phones with
Bluetooth or WIFI on .
IMU Calibration
IMU provides the original data of the drone’s attitude sensor in space. Generally, gyroscope sensor,
acceleration sensor and electronic compass provide 9dof data of spacecraft. IMU does not affect the
flight, but it can be checked when the aircraft is a bit skewed.
There are two ways to check IMU:


































































