11.3
Patch Test Criteria
The patch test requires collecting sounding data over two distinct types of sea floor topography; a
flat bottom is used for the roll computation whereas a steep slope or feature is used for the latency,
pitch, and yaw data collection.
Care must be taken that the sonar head covers the same area on both data collection runs, this may
not be the same as vessel position, especially with an over-the-side mount or if the sonar head
rotated. Only the latency data collection requires a different speed from normal survey speed.
The data collection for Latency, Pitch and Yaw should be done in as deep water as possible. This is
particularly true for the pitch computation due to the fact that in shallow water the angle of pitch
may not be easily determined due to a lack of resolution.
11.3.1
Latency Test
The vast majority of installations will incorporate GPS time synchronisation and, as such, no latency
is expected in the GPS position. However, it is necessary to complete at least one or two latency
tests to prove that the latency, for all practical purposes, is zero. Most patch test programs will not
yield zero latency, but the derived value would be so small so as to constitute a practical zero.
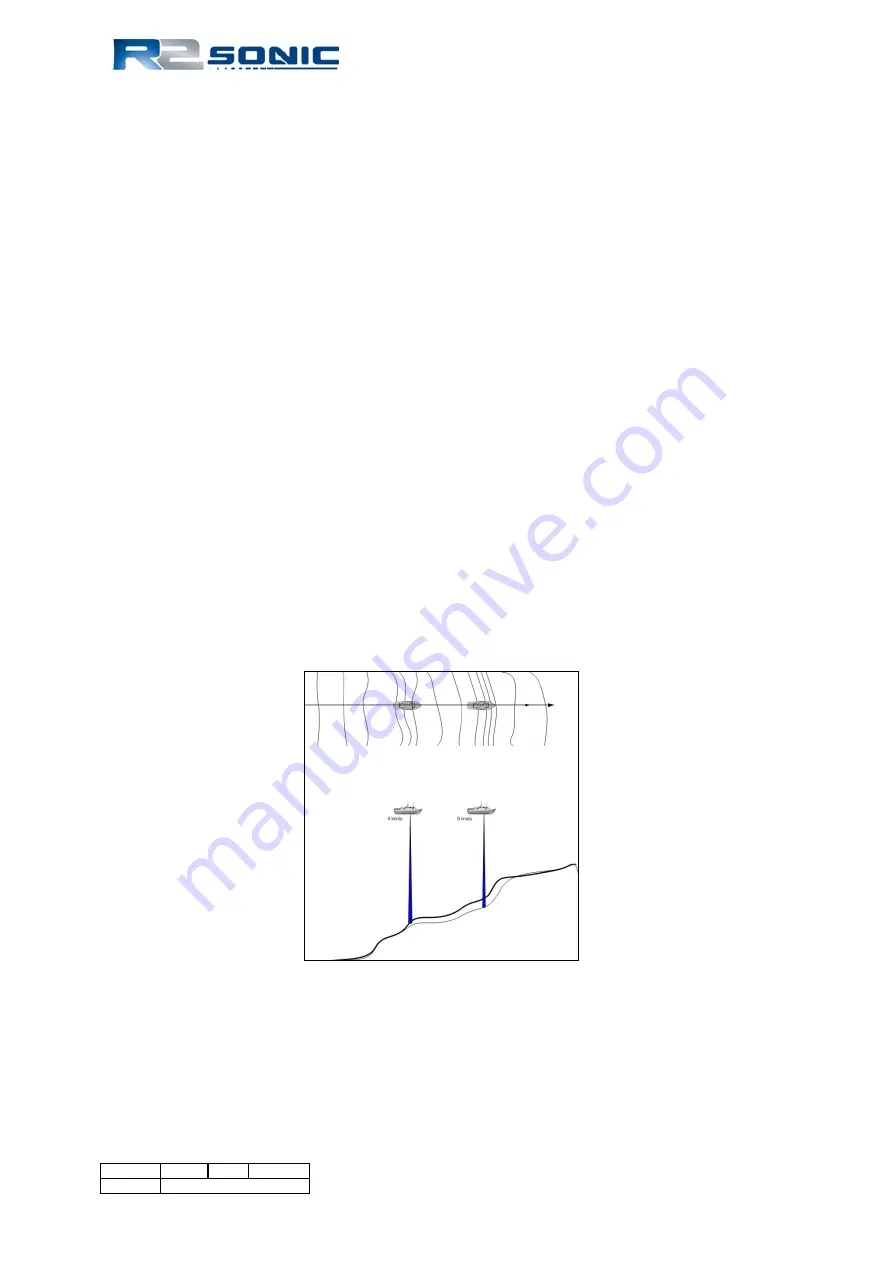
For the latency test, data is collected on a pre-defined line up a steep slope or over a well-defined
object (such as a rock or small wreck). The line is surveyed at survey speed up the slope, and then
surveyed again, in the same direction, but at a speed that should be half of the survey speed. If the
vessel cannot make way at half survey speed then the fast run will need to be taken at a higher
speed than normal survey speed and this can influence the latency test due to squat or settlement.
The main consideration is that one line should be twice the speed of the other.
Figure 131: Latency Data collection
Page
132
of
210
Version
5.0
Rev
r002
Date
05-08-2014
Part No. 96000001
Summary of Contents for 2022
Page 2: ...Page 2 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 4: ...Page 4 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 37: ...Figure 26 Projector cable configuration Page 37 of 210 Version 5 0 Rev r002 Date 05 08 2014 ...
Page 68: ...Page 68 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 86: ...Page 86 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 90: ...Page 90 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 92: ...Page 92 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 100: ...Page 100 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 104: ...Page 104 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 126: ...Figure 127 Smooth log information copied from real time survey log ...
Page 150: ...Page 150 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 164: ...Page 164 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 196: ...Page 196 of 210 Version 5 0 Rev r002 Date 05 08 2014 Part No 96000001 ...
Page 199: ...Figure 169 Sonic 2024 Receive Module Page 199 of 210 Version 5 0 Rev r002 Date 05 08 2014 ...
Page 207: ...Figure 177 SIM Stack Outline Page 207 of 210 Version 5 0 Rev r002 Date 05 08 2014 ...
Page 209: ...Figure 179 I2NS IMU Dimensions Page 209 of 210 Version 5 0 Rev r002 Date 05 08 2014 ...