


















Drive Startup Manual DSD412
Page 10
© 2020 Smartrise Engineering, Inc. All Rights Reserved
March 5, 2020
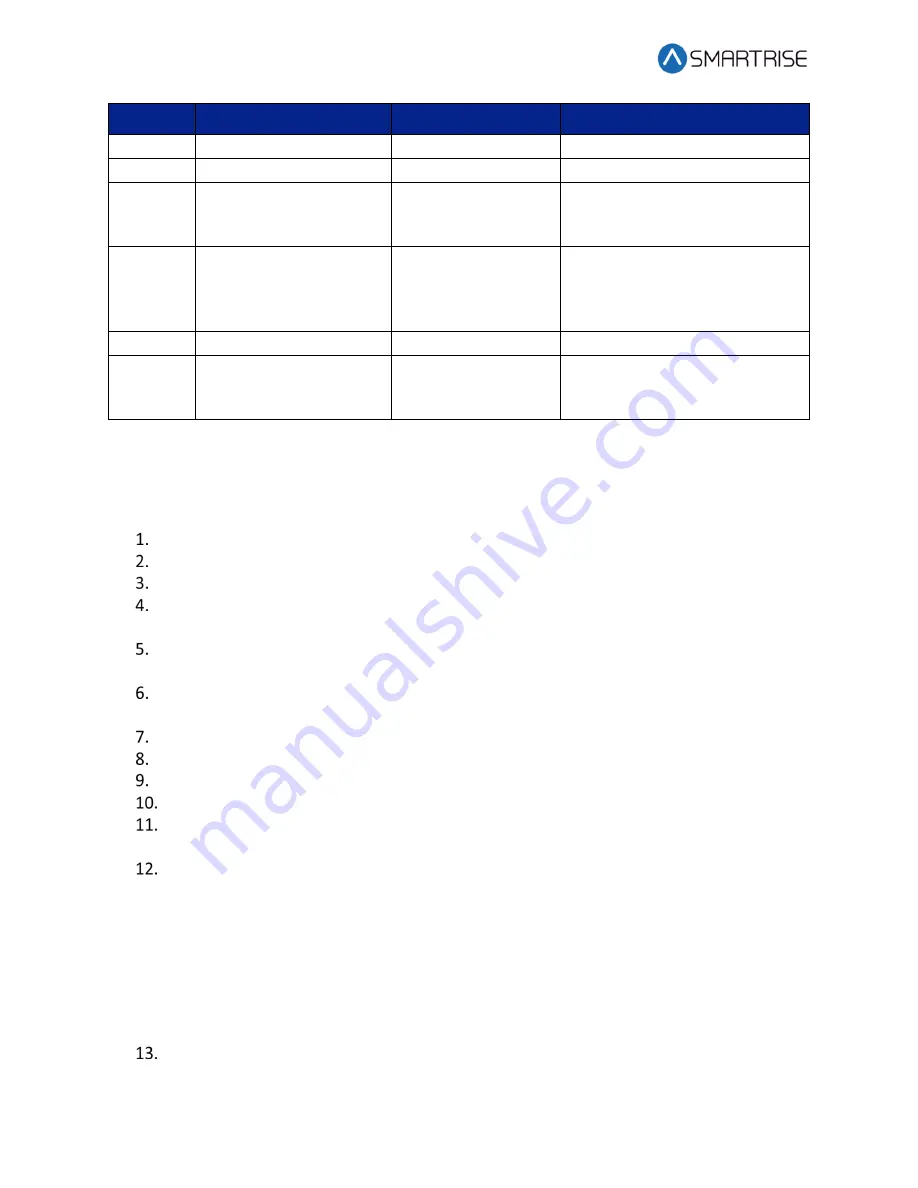
Parameter
Description
Recommended Value
Additional Information
11
Motor RPM
Motor Name Plate
17
Rated Car Speed
Per Job Specification
49
Weak Field Current
Motor Name Plate
If this value is greater than the
rated field current, then the field
will never weaken.
50
Rated Field Current
Motor Name Plate
The drive must be configured for
the correct field current range.
See the
Magnetek DSD 412
Manual for DIP switch settings.
52
Rated Field Voltage
Motor Name Plate
53
Standby Field Current
25%
This parameter cannot be set to
ON until performing the self-
tune.
Magnetek DSD412 Drive Self-Tune Procedure
Perform the Magnetek DSD412 drive self-tune procedure as follows.
Place a jumper from LPR on the DIN rail to SAFE.
Put the NVRAM Protected switch in the Not Protected position.
Perform PCU DIAGNOSTICS Function 998 to verify armature and field circuitry.
Perform SELF-TUNE PARAMETER TEST Function # 997. The drive should display PASS
after a few seconds. Set Parameter #2 to ON.
Remove the jumper and perform Function #994 to permanently save the changed
values.
Verify the Smartrise MR board LCD is not showing an active fault as indicated by a
flashing Red LED, and it displays Construction Mode.
Close the Run Bug Stop switch.
Command the Car to move.
Verify the brake is picking/holding after a valid run command is given.
Verify the brake is dropping once the command is removed.
Verify the timing and operation of the brake to ensure the motor is not running through
the brake prior to it picking.
Is the brake inoperative?
a.
If the brake is operative, go to step 13.
b.
If the brake is inoperative, check the following:
•
Check for DC voltage between points K1 and K2 on the Machine Room DIN rail.
•
Verify this voltage is also at the brake coil when commanded to pick.
•
Ensure this voltage corresponds to the voltage the brake coil is rated for.
•
If problems persist, contact Smartrise for assistance.
The encoder feedback may be out of phase upon first power-up. This may cause the
motor to run faster than commanded and/or give drive fault 408/98. Is the encoder
feedback out of phase?
Summary of Contents for DSD412
Page 1: ......