





























PLC Subroutines Manual
6FC5397-0FP40-0BA0, 08/2013
49
Table 3-20
Outputs
Name
Type
Description
Finish
BOOL
Part program selection finished
Error
BOOL
Part program selection error
Assigned global variables
SelPP_FinOm
BOOL
M239.6
Indicates that a part program has been selected
SelPP_ErrOm
BOOL
M239.7
Indicates that an error occurs when selecting a part program
Relevant PLC machine data
None
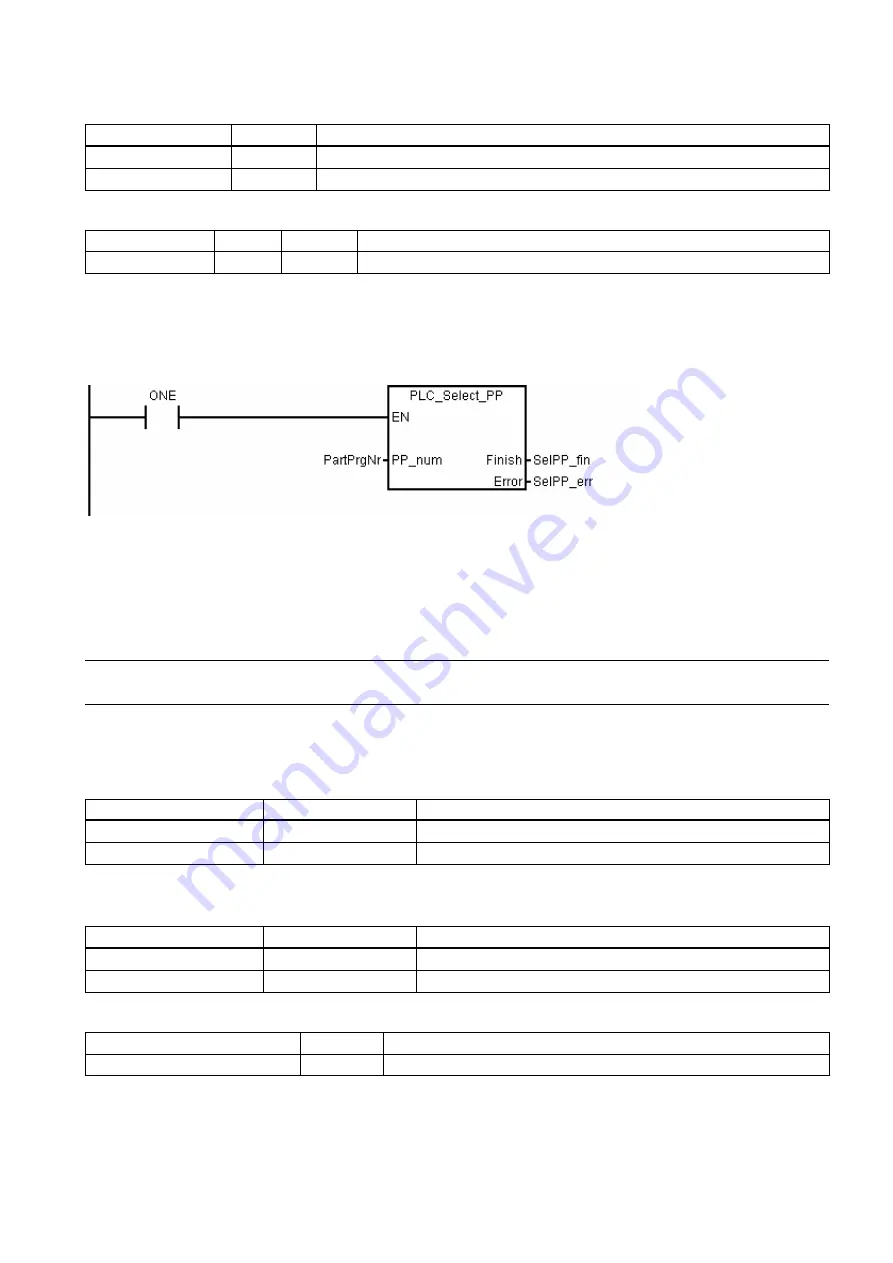
Example for calling subroutine 47
3.21
Subroutine 48 - ServPlan (service plan)
Purpose
To use subroutine 48, you must have created a service plan on the SINUMERIK 808D ADVANCED. When the pre-alarm
time arrives, the machine outputs a notification message. When the final alarm time arrives, the machine outputs an alarm
message.
Note
To perform a service plan on the PLC, you need to download DB9903(SP_INI) and DB9904(SP_ACT).
Local variable definition
Table 3-21
Inputs
Name
Type
Description
Deact0
BOOL
Freezing a service plan
AckMsg0
BOOL
Confirming the notification message of a service plan
Table 3-22
Outputs
Name
Type
Description
HintMsg0
BOOL
Notification message
Alarm0
BOOL
Alarm message
Assigned global variables
ServPlan_msg0
BOOL
Notification message of the first service plan
ServPlan_alm0
BOOL
Alarm message of the first service plan





















































