
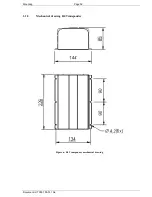




























Mounting Page
45
Document id: 7000 108-011 A2
the position source with the highest priority available. The
priority scheme is defined by the AIS standard (Ref. [5]). The
appropriate information will be used accordingly.
2.16.3.3 Heading
(HDT)
All ships will not carry a gyrocompass according to IMO A.526.
However, if a gyrocompass, which provides heading information
(and possibly ROT data, see section 2.16.3.4), is available and it
includes an IEC 61162 interface, it shall be connected to the R4
Transponder.
If the ship’s gyrocompass does not provide an IEC 61162 output, a
converter unit (e.g. stepper to NMEA) will be needed to connect to
the R4 Transponder.
2.16.3.3.1 Heading Sensor Fallback Condition
The R4 transponder automatically selects the heading source with the highest priority,
based on the talker identifier of the sensor sentence. The priority is according to table
below.
Talker Id
Priority
$HE--- Highest
Priority
$HC---
$-----
Any talker identifier. Lowest Priority
2.16.3.4
Rate of Turn (ROT)
All ships will not carry a Rate-of-Turn (ROT) Indicator according to
IMO A.526. However, if a Rate-of-Turn Indicator is available and it
includes an IEC 61162 interface, it shall be connected to the R4
Transponder.
2.16.3.4.1 Other ROT sources
If ROT information is not available from a Rate-of-Turn Indicator, it
may (optionally) be derived through:
•
The gyrocompass itself (see section 2.16.3.3)
•
Other external sources giving ROT or heading
•
The AIS itself based on external heading
However, in any of the above cases, the AIS will only indicate the
rate of turn direction (not the ROT value).
ROT data shall not be derived from COG information.







































































