





























106
Rockwell Automation Publication 750-PM101B-EN-P - April 2022
Chapter 4 Troubleshooting
30 VRef PID Sel
If this signal is non-zero, then the PID Output Meter
has exclusive control of the Velocity Reference. If
this signal is zero, then the Velocity Reference is
controlled by 10:1892 [VRef Selected].
DINT
t/f
31
VRef Homing
Velocity reference signal used for the Homing
function.
REAL
PU
32 VRef DIR Sel
If this signal is non-zero, then the active direction
for Unipolar Direction Mode will be forward. If this
signal is zero, then the active direction for Unipolar
Direction Mode will be reverse.
DINT
t/f
33 Vref CLmt In
Velocity Reference signal at the input to the Min and
Max Velocity Command Limiters.
REAL
PU
34 VRef SkipOut
Velocity Reference signal at the output of the Skip
Band function.
REAL
PU
35 VRef Psn FF
Velocity feed forward reference signal used when
position control is active. Sums with velocity ramp
output.
REAL
PU
36 VRef NF In
Velocity Reference at the input to the reference
notch filters. The output of these filters is
10:1925 [Vref Filtered].
REAL
PU
37 VRef Scaled
Velocity Reference at the output of the multiply
block that applies 10:1932 [VRef Scale].
REAL
PU
38 VRef FLmt In
Velocity Reference signal at the input to the Final
velocity limiter. The output of this limiter is
10:1933 [VRef Final].
REAL
PU
40 VReg SrvLock
Output of the Servo Lock function in the Velocity
Regulator. Sums with 10:1951 [Velocity Error].
REAL
PU
41
aVRegKp
Internal proportional gain used in the velocity
regulator. Incorporates gain scaling from Adaptive
Tuning and Alternate Feedback. Also includes
conversion from Hz to rad/sec.
REAL
R/S
42 aVRegKi
Internal integral gain used in the velocity regulator.
Incorporates gain scaling from Adaptive Tuning and
Alternate Feedback. Also includes Kp gain and
conversion from Hz to rad/sec.
REAL
R/S
43 VReg Lmt In
Input signal to the Acceleration Limiter in the
Velocity Regulator. Units are PU Velocity per second.
REAL
PU/S
44 Kj
Scale factor used to convert acceleration signals to
torque signals. Proportional to system inertia.
Acceleration units are PU Vel/sec. Torque units are
PU motor torque.
REAL
Sec
50 Trq Scale
Scale factor used to convert acceleration signals to
torque signals. Proportional to system inertia.
Acceleration units are rev/sec
2
. Torque units are
percent of rated motor torque.
REAL
51 TrqRefPosLimActv
Positive limit that is being applied to the Trq Ref
Filtered parameter. Result is displayed in Trq Ref
Limited parameter.
REAL
Nm
52 TrqRefNegLimActv
Negative limit that is being applied to the Trq Ref
Filtered parameter. Result is displayed in Trq Ref
Limited parameter.
REAL
Nm
100 EncdrlsCompTestState Encoderless test state.
DINT
n/a
101 IqsRefLmtd
Torque producing Current Reference. Output of the
Current Rate Limiter.
REAL
PkA
105 PhsLossAmptdRO
Ratio of second harmonocs amplitdue to sixth
harmonics.
DINT
n/a
106 PhsLossDtctCnts
Input phase loss detection counts.
REAL
Cnts
110 OloopOmegaOutput
Electrical speed generated in FV open loop control
mode.
REAL
R/S
111 OmegaRotor
Rotor speed generated in FV open loop control
mode.
REAL
R/S
115 IaFbk
A-phase simultaneously sampled current feedback
scaled to units of the system.
REAL
PkA
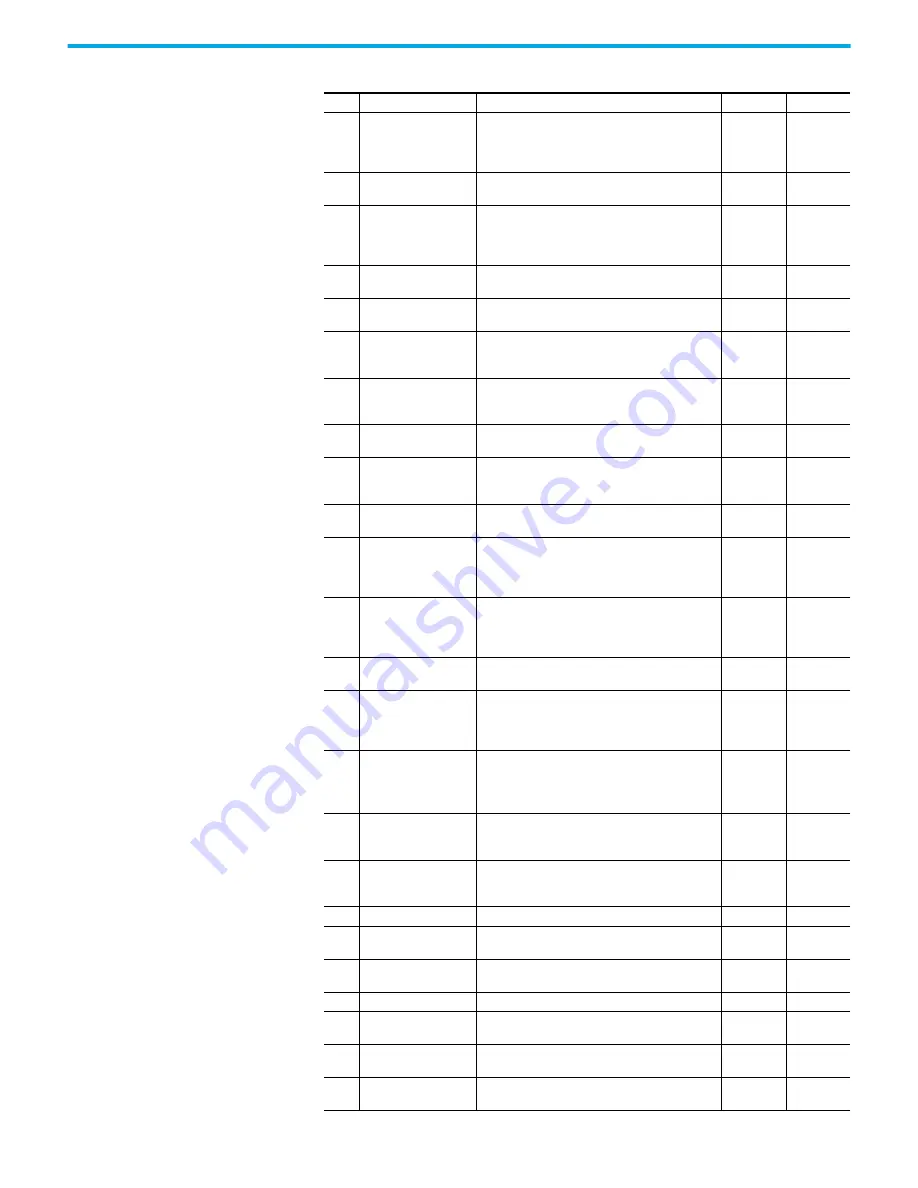
Port 10 Testpoint Codes (Continued)
No. Name
Description
Data Type
Units