





























B-2
Accessories and Dimensions
Accessory Dimensions
All dimensions are in millimeters and (inches). Dimensions are not used for
manufacturing purposes.
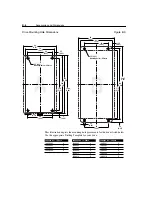
Dynamic Brake Modules
Figure B.1
Bulletin 1321 Line Reactors
Figure B.2
Catalog No.
A
B
160-BMA1
&
160-BMB1
245 (9.64)
225 (8.86)
160-BMA2
&
160-BMB2
334 (13.15)
314 (12.36)
Catalog No.
A
B
C
D
E
1321-3R2-A
112 (4.4)
104 (4.1)
74 (2.9)
50 (2.0)
37 (1.44)
1321-3R2-B
112 (4.4)
104 (4.1)
74 (2.9)
50 (2.0)
37 (1.44)
1321-3R4-A
112 (4.4)
104 (4.1)
76 (3.0)
50 (2.0)
37 (1.44)
1321-3R4-B
112 (4.4)
104 (4.1)
76 (3.0)
50 (2.0)
37 (1.44)
1321-3R8-A
152 (6.0)
127 (5.0)
76 (3.0)
53 (2.1)
51 (2.0)
1321-3R8-B
152 (6.0)
127 (5.0)
76 (3.0)
53 (2.1)
51 (2.0)
1321-3R12-A
152 (6.0)
127 (5.0)
76 (3.0)
53 (2.1)
51 (2.0)
1321-3R18-A
152 (6.0)
133 (5.3)
79 (3.1)
51 (2.0)
51 (2.0)
GND
+
BR
–
BR
WARNING
DANGER
DANGER
–
BR
+
BR
GND
50
(1.97)
72
(2.83)
86.4
(3.4)
B
A
6.86 (0.27)
Mounting Holes – 4 Places –
8 (0.315)
7.5
(0.3)
14
(0.55)
29
(1.14)
B
E
D
C
A
Summary of Contents for Allen-Bradley 160 SSC Series
Page 12: ...1 6 Getting Started End of Chapter ...
Page 58: ...5 20 Parameters and Programming End of Chapter ...
Page 66: ...A 4 Specifications End of Chapter ...
Page 75: ...Accessories and Dimensions B 9 Drilling Template A Figure B 10 ...
Page 76: ...B 10 Accessories and Dimensions Drilling Template B Figure B 11 ...
Page 82: ...C 6 CE Conformity End of Chapter ...
Page 87: ......







































































