





























RS-Ruby Lite Users’ Manual
18
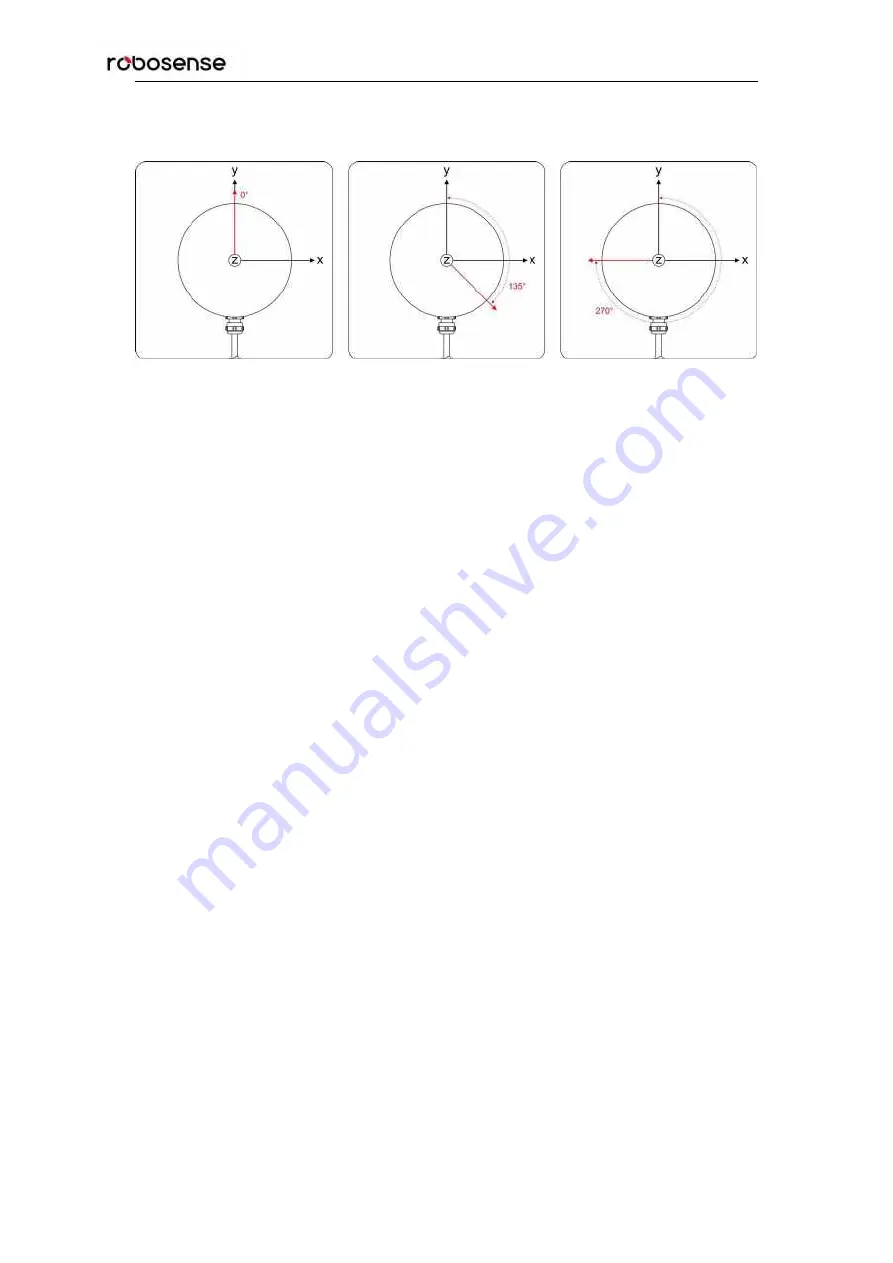
In Figure 10 different Phase Lock is shown as red arrow. When PPS is triggered, sensor can
rotate to the 0°, 135°or 270°.
Figure 10:Different phase lock angles 0°/135°/270°.
In Web sever -> Option “Setting” ->
Phase Lock Setting
, the angle of phase lock can be set in
the interval [0°~ 360°], refer to section A.2.
Summary of Contents for RS-Ruby Lite
Page 1: ...RS Ruby Lite Users Manual...
Page 49: ...RS Ruby Lite Users Manual 44 Appendix E Dimension Figure E 1 Dimensions of Ruby...
Page 52: ...RS Ruby Lite Users Manual 47...
Page 53: ...RS Ruby Lite Users Manual...
Page 101: ...RS Ruby Lite Users Manual 44 Appendix E Dimension Figure E 1 Dimensions of Ruby...
Page 104: ...RS Ruby Lite Users Manual 47...