





























23
RS-Bpearl User Manual
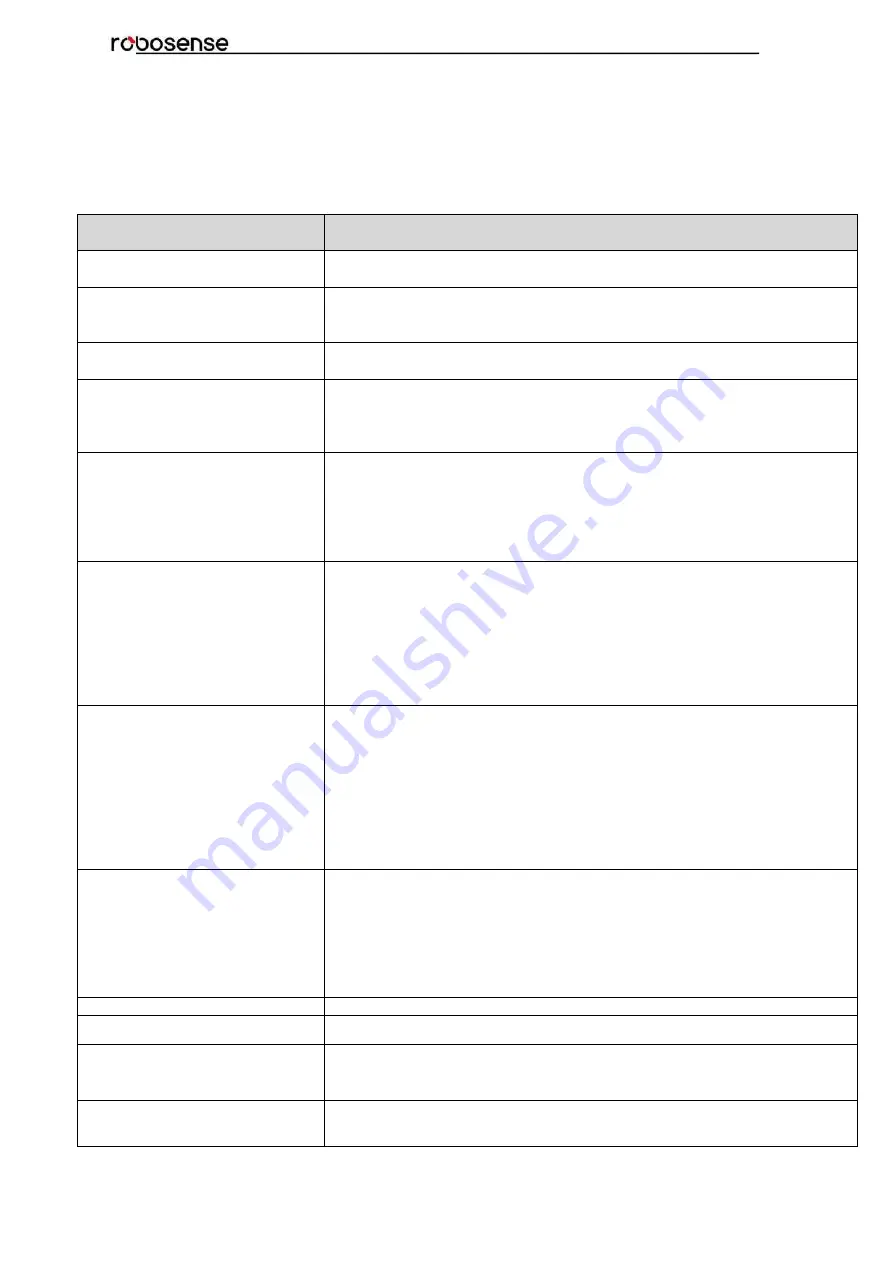
11.Troubleshooting
This section provides detail on how to troubleshoot your sensor.
Problem
Resolution
Interface BOX red LED doesn’t
light or blink
Verify the power connection and polarity
Verify the power supply satisfy the requirement (at least 3A @ 12V)
Interface BOX red LED lights on
but green LED doesn’t light or
blink
Verify the connection between Interface BOX and LiDAR is solid.
Rotor doesn’t spin
Verify the Interface BOX LEDs is okay
Verify the connection between Interface BOX and LiDAR is solid.
Reboot at the boot time
Verify the power connection and polarity
Verify the power supply satisfy the requirement (at least 3A @ 12V)
Check if the LiDAR mounting plane is level or if the LiDAR bottom
fixing screws are too tight.
Unit spins but no data
Verify network wiring is functional.
Verify receiving computer's network settings.
Verify packet output using another application (e.g. Wireshark)
Verify no security software is installed which may block Ethernet
broadcasts.
Verify input voltage and current draw are in proper ranges
Can see data in Wireshark but
not RSVIEW
Check no firewall is active on receiving computer.
Check the receiving computer’s IP address is the same as LiDAR
destination IP address.
Check the RSVIEW Data Port setting.
Check the RSVIEW installation path and LiDAR configuration files path
both do not contain any Chinese characters.
Check if the wireshark receive the MSOP packets.
Data dropouts
This is nearly always an issue with the network and/or user computer.
Check the following:
Is there excessive traffic and/or collisions on network?
Are excessive broadcast packets from another service being
receivedby the sensor? This can slow the sensor down.
Is the computer fast enough to keep up with the packet flow coming
from the sensor?
Remove all network devices and test with a computer directly connected
to the sensor.
GPS not synchronizing
Check baud rate is 9600 and serial port set to 8N1 (8 bits, no parity, 1
stop bit).
Check the signal level is RS232 level
Check electrical continuity of PPS and serial wiring
Check incorrect construction of NMEA sentence
Check the GPS and Interface BOX are connected to the same GND
Check the GPS receive the valid data
No data via router
Close the DHCP configuration
Sensor point cloud data distortion
Check the configuration files is right
A blank region rotates in the
cloud data when using ROS
driver
This is the normal phenomenon as the ROS driver use fixed packets
quantity to divide display frame. The blank region data will output in the
next frame.
Point cloud data to be a radial
If the computer is windows 10 OS, then run the RSVIEW with windows
7 OS compatible mode.
Summary of Contents for RS-Bpearl
Page 1: ...RS Bpearl User Manual...
Page 13: ...8 RS Bpearl User Manual Figure 5 Single Return MSOP...
Page 48: ...43 RS Bpearl User Manual Figure C 21 Fault Diagnosis Dialogue...
Page 52: ...47 RS Bpearl User Manual Appendix E Dimension Figure E 1 Dimension Drawing of RS LiDAR Bpearl...
Page 56: ...RS Bpearl User Manual...





















































