





























Fr
ançais
Fr
ançais
1.
Mettre tout d‘abord le modèle en marche en exerçant une pression prolongée sur
la touche ON/OFF
1E
.
2.
Brancher ensuite le câble de chargement/données dans la connexion USB
1G
.
3.
Brancher maintenant l‘autre extrémité du câble de chargement/données dans le
port USB d‘un ordinateur. Après un court protocole d‘installation, l‘ordinateur est prêt
à télécharger les données du modèle. Veuillez respecter les procédures à suivre
relatives au système de votre ordinateur.
8 TÉLÉCHARGEMENT DE PHOTOS ET VIDÉOS
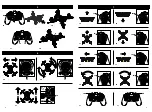
7 PILOTAGE
Le modèle est équipé d‘un assistant de contrôle de la hauteur qui permet d‘apprendre
à le piloter simplement et rapidement. L‘assistant est un capteur capable de mesurer
exactement la pression d‘air sur environ 10 centimètres de hauteur et permet ainsi, de
maintenir automatiquement le quadcopter à l‘altitude indiquée. Il suffit donc, au début,
de se concentrer sur les déplacements avant/arrière et latéraux.
Attention :
en raison des influences extérieures, il est possible que la pression à
l‘intérieur du modèle change, ce qui fait qu‘il monte ou descend lentement de lui-même.
Ce n‘est pas une panne. Dans une telle situation, il suffit de compenser brièvement le
mouvement à l‘aide du régulateur de poussée et de rotation
2A.
Note :
des ajustements infimes au niveau des régulateurs suffisent pour obtenir un
comportement de vol calme du modèle ! Les indications de direction sont valables en
observant le modèle de l‘arrière. Si le modèle vole en direction du pilote, il faut le piloter
dans la direction opposée.
Mettre le modèle en marche comme indiqué dans le point 5 et démarrer les rotors en
déplaçant les régulateurs
2A
et
2B
vers le bas et l‘extérieur.
7A
Pour décoller ou gagner de l‘altitude, diriger légèrement la commande de gaz et
de rotation gauche/droite
(2A)
vers l‘avant.
7B
Diriger la commande des gaz et de rotation gauche/droite
(2A)
vers l‘arrière pour
atterrir ou réduire l‘altitude de vol.
7C
Pour voler en avant, diriger légèrement le régulateur de déplacement avant/arrière
et de translation latérale
(2B)
vers l‘avant.
7D
Pour voler vers l‘arrière, diriger légèrement le régulateur de déplacement avant/arrière
et de translation latérale
(2B)
vers l‘arrière.
7E
Pour voler vers la gauche, diriger légèrement le régulateur de déplacement
avant/arrière et de translation latérale
(2B)
vers la gauche.
7F
Pour voler vers la droite, diriger légèrement le régulateur de déplacement avant/arrière
et de translation latérale
(2B)
vers la droite.
7G
Pour faire tourner le modèle vers la gauche, diriger légèrement le régulateur de poussée
et de rotation
(2A)
vers la gauche.
6 ÉQUILIBRAGE DE LA COMMANDE
6B Si le modèle tourne de lui-même sur son axe, rapidement ou lentement, …
poussez graduellement le compensateur pour tourner
(2C)
dans la direction opposée.
6C Si le modèle se déplace de lui-même, rapidement ou lentement, vers
l‘avant ou l‘arrière …
pousser graduellement le compensateur de vol avant et arrière
(2D)
dans la direction opposée.
Un réglage correct du compensateur est la condition de base requise pour un comporte-
ment de vol irréprochable du modèle. La syntonisation est simple, mais nécessite de
la patience et du doigté. Veuillez respecter scrupuleusement les consignes suivantes :
Diriger légèrement la commande des gaz vers le haut et faire monter l’hélicoptère à
une hauteur de 0,5 à 1 mètre.
6A Si le modèle se déplace de lui-même, rapidement ou lentement, vers la
gauche ou vers la droite …
pousser graduellement le compensateur de vol en translation latérale
(2E)
dans la
direction opposée.
7H
Pour faire tourner le modèle vers la droite, diriger légèrement le régulateur de
poussée et de rotation
(2A)
vers la droite.
7I
Appuyer sur la touche
2H
pour que la caméra prenne une photo. Auparavant,
s‘assurer qu‘une carte micro-SD se trouve dans la fente correspondante
1F
.
7J
Appuyer sur la touche
2I
pour démarrer l‘enregistrement d‘une vidéo. Une autre
pression interrompt l‘enregistrement.
7K
Une pression verticale courte (environ 0,3 secondes) sur le régulateur
2A
active le
mode headless.
Le mode headless assiste les débutants dans leurs premiers pas
car quelle que soit l‘orientation du quadricoptère, la direction de vol correspond
toujours exactement au sens dans lequel le régulateur de déplacement avant/
arrière et de translation latérale
(2B)
commande d‘appareil. Un exemple : Si le
pilote faisait pivoter le modèle à 180° et voler vers lui, il devrait changer de perspec-
tive pour le déplacement avant/arrière et la translation latérale, c‘est-à-dire utiliser
les commandes inverses. En activant le mode headless, cela n‘est plus nécessaire
car le processeur interne convertit toujours automatiquement les directions des
commandes. Une autre pression sur la touche
2A
permet de désactiver le mode.
Attention :
À chaque mise en marche, le modèle enregistre l‘orientation vers l‘avant. Cela
signifie que pour piloter, il ne faut pas se retourner sinon, on perçoit l‘« avant » ainsi que de
la « droite » et la « gauche » différemment par rapport au modèle. Si l‘on change de
position et l‘on souhaite utiliser le mode headless, ou si suite à une collision l‘orientation
des commandes ne correspond plus, il est nécessaire de réinitialiser le modèle.
ÉTAT DE LA BATTERIE :
• Lorsque le modèle perd de la poussée, la batterie est bientôt vide.
Atterrissez pour éviter la chute de l‘appareil.
7L
Une pression verticale prolongée (environ 2 secondes) sur le régulateur
2A
active la
fonction flip. Le mouvement suivant à l‘aide du levier de commande
2B
fait faire un flip
de 360° au modèle dans cette direction. Dans ce cas, veiller à maintenir une hauteur
de sécurité de 2 mètres environ et vérifier que la batterie soit suffisamment chargée.
7M
Une pression verticale courte sur le régulateur
2B
active la deuxième vitesse. La
télécommande émet deux brefs bips de confirmation. Une autre pression sur la touche
rétrograde en première vitesse.
32
33
































































