





























Radiolink Electronic Ltd
15
8. When there are three D sounds made by the buzzer, it means the compass calibration is done with
success. Restart the flight controller and it’s enabled.
Note
1. If calibration fails, there would be two D sounds from the buzzer then continuous DD sounds like once per
second, meaning the flight controller restarts to calibrate. Please repeat the above steps.
2. If it doesn’t succeed after several trials, or you are asked to cancle during the calibration, toggle the throttle
gimbal stick to the top position(max.) and YAW to the rightest and hold these positions for more than 2s to
cancel.
3. If the calibration can’t be made with transmitter, it’s adviced to cancel it and calibrate with the Mission
Planner instead.
3.5 Radio Calibration
This article shows how to perform radio control calibration using
Mission Planner
.
RC transmitters are used to control vehicle movement and orientation. Copter and Plane minimally control
throttle, pitch, roll and yaw, while on Rover we just control throttle and roll. Each of these control signals are
mapped to transmitter stick/switch(s) and in turn to autopilot channels from the connected receiver.
Calibrating each of the transmitter controls/channels is a straightforward process - simply move each of the
enabled sticks/switches through their full range and record the maximum and minimum positions.
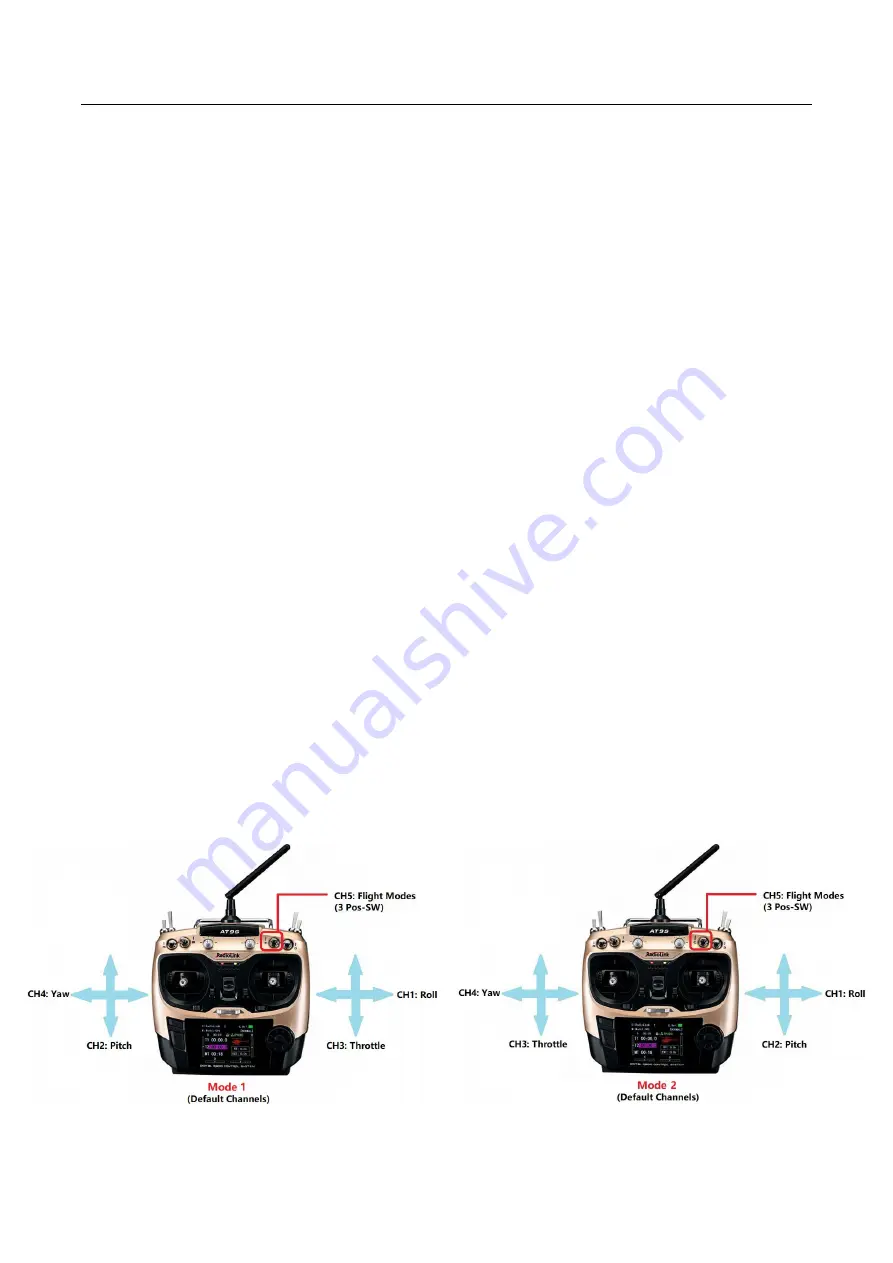
There are two main transmitter configurations:
Mode 1:
left stick controls pitch and yaw, the right stick will control throttle and roll.
Mode 2:
left stick controls throttle and yaw; the right stick will control pitch and roll.
Copter default channel mappings are:
Channel 1: Roll
Channel 2: Pitch
Channel 3: Throttle
Channel 4: Yaw
Channel 5: Flight modes
Channel 6: (Optional) In flight tuning or camera mount (mapped to transmitter tuning knob)
Unused channels can be mapped to control additional peripherals.
For safety, you should disconnect the battery and/or remove propellers before preforming radio calibration.