





























25
3.6 Flight Modes
Mini Pix has 20 flight built-in flight modes, 10 of which are regularly used. There are modes to
support different levels/types of flight stabilization, a sophisticated autopilot, a follow-me system etc.
Flight modes are controlled through the radio (via a transmitter switch), via mission commands, or
using commands from a ground station (GCS) or companion computer.
You can setup six flight modes once and max setup eight modes combine with AUX-CH (CH7 and
CH8).
Flight modes setting steps:
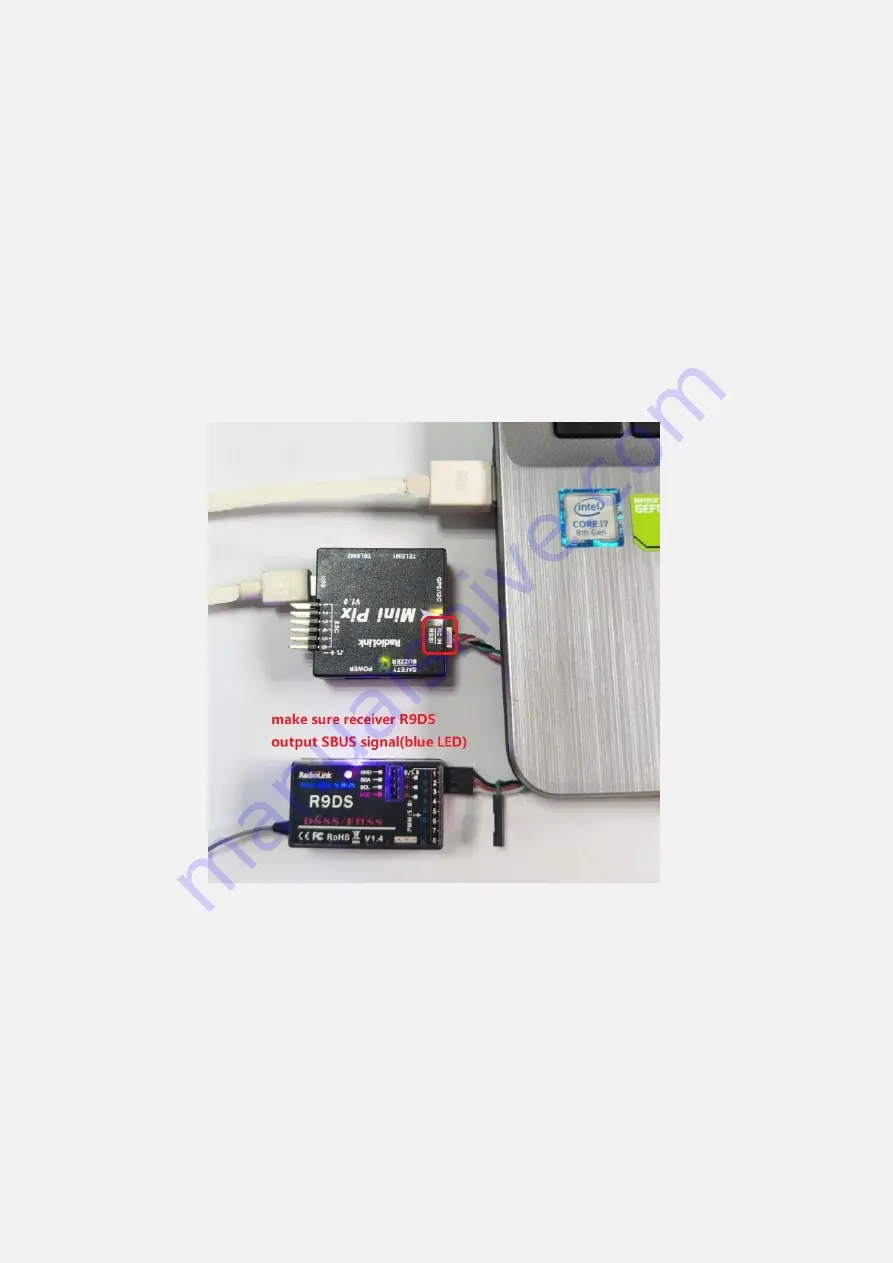
1. Connect MINI PIX and receiver (connect the RC port of MINI PIX, and make sure receiver work as
SBUS signal).
2. Make sure transmitter bind to receiver success.
3. Make sure MINI PIX connect to Mission Planner success and click INITIAL SETUP
—
Mandatory
Hardware
—
Flight modes, you can setup the flight modes you want in this menu.
Summary of Contents for Mini Pix
Page 4: ...4 1 2 Connectors ...
Page 5: ...5 Parameters ...
Page 14: ...14 4 Place vehicle DOWN and press any key to save setting ...
Page 46: ...46 Hexacopter Octocopter Y6 ...





















































