

















7
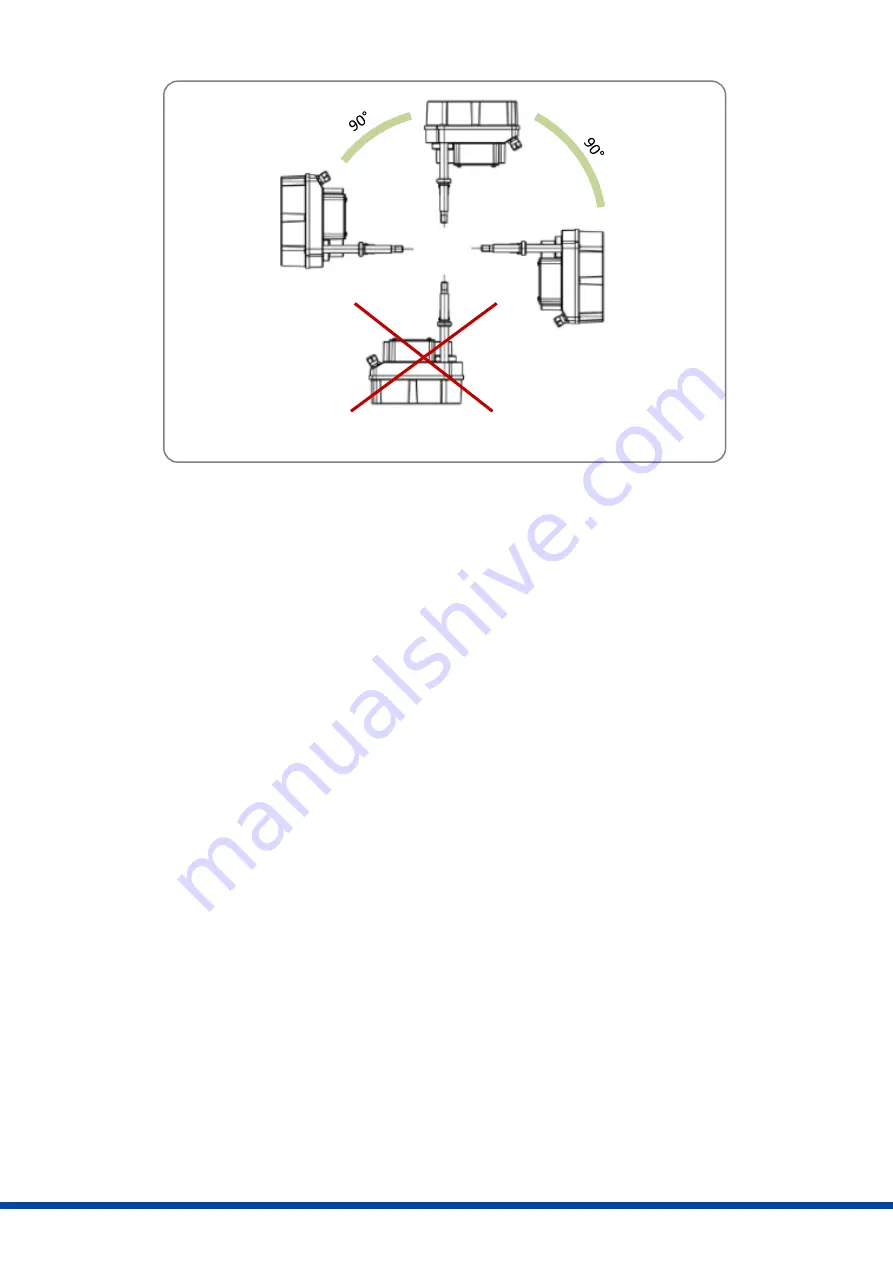
Installation position
Figure 2: Installation positions
5. Function
The actuator PSF-M-EX is designed for use as an electric valve actuator with emergency handwheel. The actuator
columns are used for mounting on the valve. Depending on the valve design, a rod lantern or a special valve
mounting plate is required.
The torque generated by a brushless DC motor (BLDC) is transmitted to a spindle nut via a multi-stage spur gear. The
spindle nut converts the delivered torque into an axial force via a spindle. The resulting linear stroke movement is
transmitted to the valve spindle via a coupling piece.
The actuator stroke is detected and controlled by a linear 12-bit HALL sensor.
Emergency actuation of the actuators in the event of a power failure is possible via the handwheel.
The electrical connection is made via terminal strips in the drive.
6. Manual operation and setting of the DIP switches
6.1 Setting the actuators during commissioning (cover open)
When commissioning the actuators, the cover must be opened. The cover may only be opened in non-hazardous
areas and in a dry environment (see chapter 8).
For actuation of the actuator during adjustment work (valve assembly and end position adjustment), an electrical
manual override by means of a pushbutton is provided (for operation, see section 10.3).
Programming of the controls (DIP switch) is possible in the de-energised state (see chapter 10.1). To do this, first
loosen 4 fastening screws of the upper cover of the Ex d control housing, then the upper cover can be removed from
the Ex d control housing. The upper cover of the Ex d control housing must not be damaged in the area of the joint
gap when removing it.
The upper cover of the Ex d control housing must be installed taking into account the position of the push button
and the light guide (see figure 3). The tightening torque for the Ex d cover screws is 6 Nm, minimum quality of the
screws 8.8.
The operating status (status display LED in the Ex d control housing) is indicated by a light guide in the Ex housing
(see chapter 10.4).







































































