



















Dedalus autopilot– user's manual
Figure
10
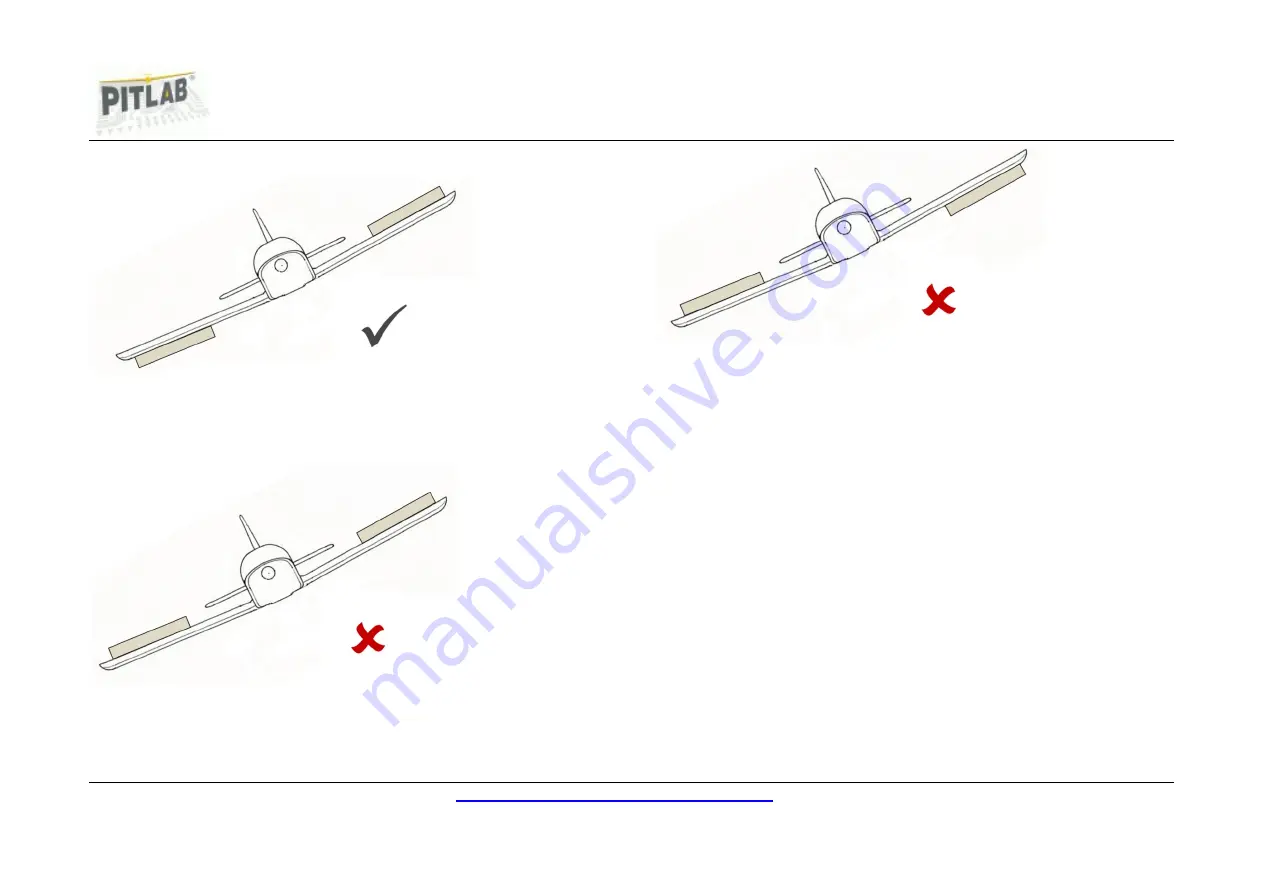
The correct setting of concurrency and servos reverses
Figure
11
incorrectly set servos concurrency
Figure
12
Incorrect setting of the reverse (correct concurrency setting)
Since the rudder is not used for the stabilization of flight, it is not possible to
set its reverse on the basis of observation of the reaction of the model to
movements. Therefore, after any change to reverse of the rudder the
autopilot moves the rudder like to the right for about 1 second. If you see the
rudder turn left after the change of the reverse setting, it means that the
setting is incorrect.
© PitLab 2015
http://www.pitlab.com/dedalus-autopilot.html
page 9 of 20