



















EtherCAT
Operating Manual EtherCAT for, PMCtendo DD5 and PMCprotego D
1002906-EN-02
25
Bit
Value (bin)
Value (hex)
Description
00000011 00000000
03xx
Acknowledge value external
latch 2 (positive rise)
00000100 00000000
04xx
Acknowledge value external
latch 2 (negative rise)
00000101 00000000
05xx
A
cknowledge value internal
latch C (positive rise)
12 - 15
00010000 00000000
1xxx
State Digital Input 4
00100000 00000000
2xxx
State Digital Input 3
01000000 00000000
4xxx
State Digital Input 2
10000000 00000000
8xxx
State Digital Input 1
4.10
Mailbox Handling
With EtherCAT the acyclical data traffic (object channel or SDO channel) is called mailbox.
The approach of the Master is considered:
Mailbox Output
Data are sent from the Master (EtherCAT control) to the Slave
(servo amplifier). It is a requirement (read/write) of the master.
The Mailbox Output runs via the Sync Manager 0.
Mailbox Input
Data are sent from the Slave (Servo amplifier) to the Master
(EtherCAT control). The Master reads the answer from the
slave. The Mailbox Input runs via Sync Manager 1.
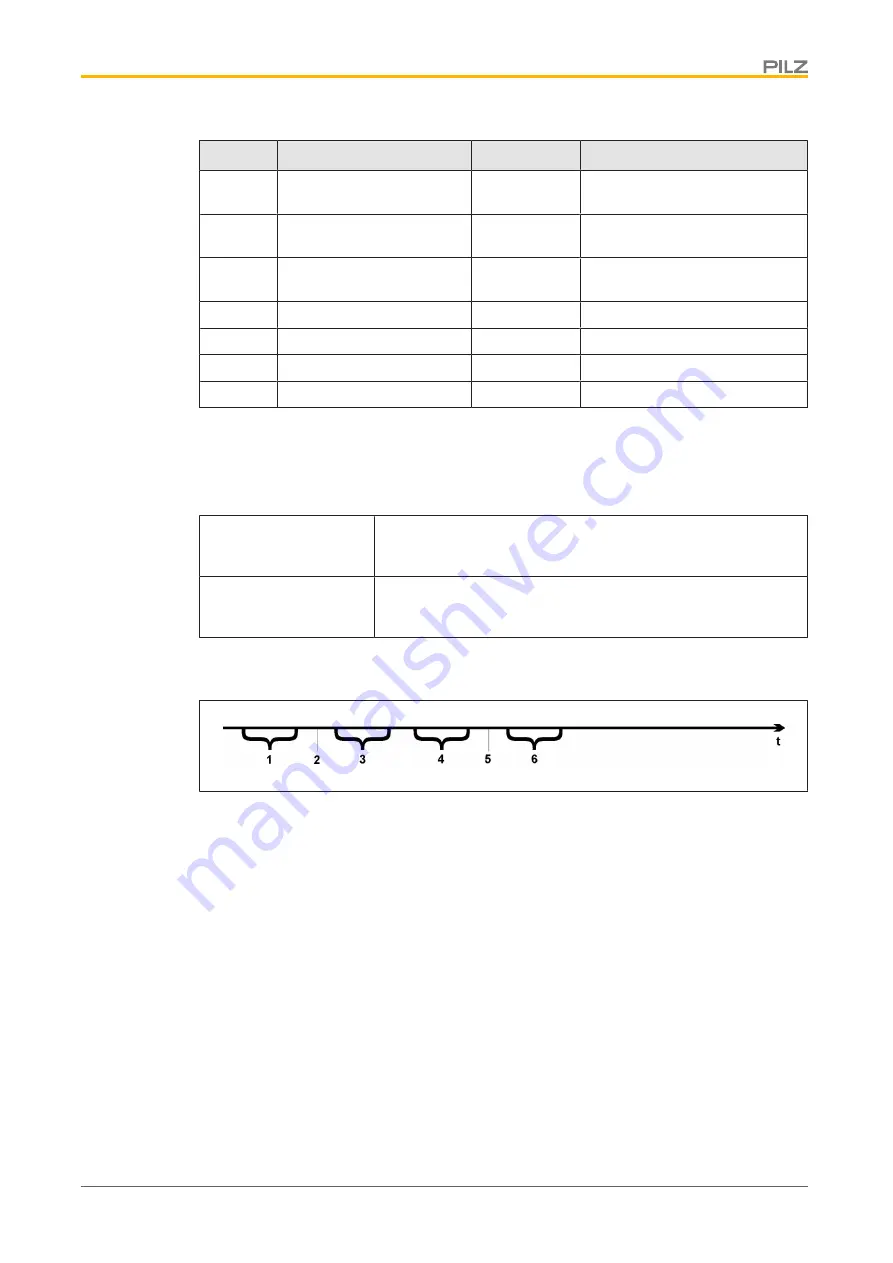
The Timing diagram illustrated the processing of a mailbox access:
Legend
1
EtherCAT Master writes the mailbox request in the Mail Out Buffer.
2
At the next interrupt, the EtherCAT interface triggers a Sync Manager 0 Event (Mail-
box Output Event) in the AL Event Register.
3
The servo amplifier reads 16 Byte from the Mail Out Buffer and copies it into an in-
ternal Mailbox Output Array.
4
The servo amplifier detects new files in the internal mailbox output array, and it ex-
ecutes the SDO access to the object requested by the EtherCAT interface. The reply
from the servo amplifier is written to an internal Mailbox Input Array.
5
The servo amplifier deleted all the data in the internal Mailbox Output Array and
paves the way for a new mailbox access.
6
The servo amplifier copies the response telegram from the internal Mailbox Input Ar-
ray into the mail in the buffer of the EtherCAT interface.





















































