






















EtherCAT
Operating Manual EtherCAT for, PMCtendo DD5 and PMCprotego D
1002906-EN-02
22
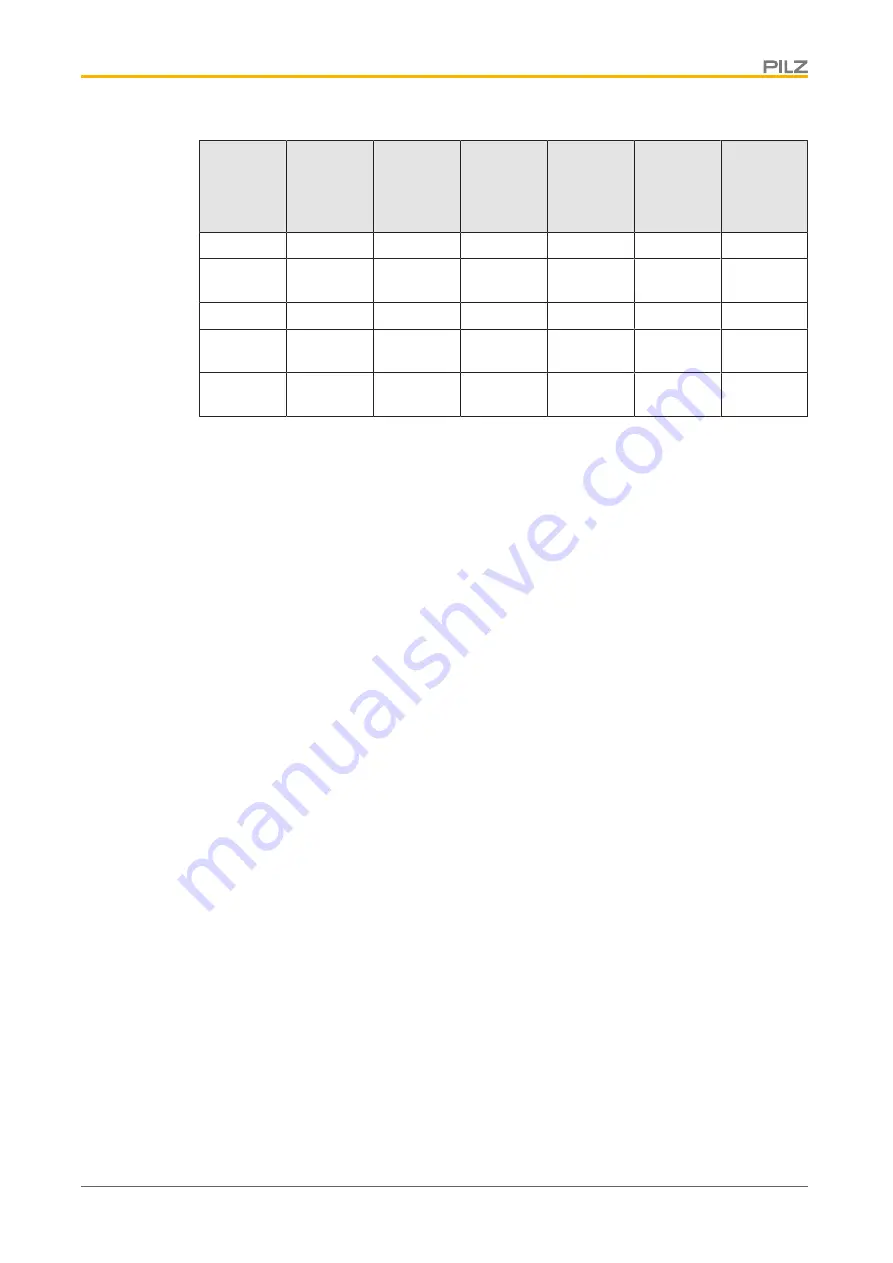
Status
Bit 6 =
Switch-on
disable
active
Bit 5 =
No E-
STOP
active
Bit 3 =
Error
Bit 2 =
Operation
enabled
Bit 1 =
Switched
on
Bit 0 =
Ready to
switch on
Switch On 0
1
0
0
1
1
Operation
Enable
0
1
0
1
1
1
Fault
0
1
1
0
0
0
Fault reac-
tion active
0
0
1
1
1
1
Quick Stop
Active
0
0
0
0
1
1
Legend
X
Bits are irrelevant
1/0
Status of the individual bits
Additional Information
Bit 4
1 = Intermediate circuit voltage is present
Bit 7
1 = A warning is present at the device
Bit 8
1 = Position error present (in all position modes (OPMODE = 4, 5, 6, 8))
Bit 10
1 = Target reached (in position)
Bit 11
1 = Restrictions active (e.g. hardware or software end switch has triggered)
Bit 12
1 = Reference run active
Bit 13
1 = Reference run error
Bit 15
1 = Motion task active (in profile position mode)
4.5
Implemented operating modes
The following operating modes are implemented via the object 0x6060:
}
cyclic synchronous position mode 0x08 and 0xFA
}
cyclic synchronous velocity mode 0x09 and 0xFE
}
cyclic synchronous torque mode 0x0A and 0xFD
}
homing mode 0x06 and 0xF9
The negative values correspond to the manufacturer-specific settings such as the OP-
MODE command.
4.6
Setting the EtherCAT cycle time
The cycle time used in the servo amplifier for the cyclical set and actual values can be
present either configured in the amplifier in the parameter PTBASE or it can be configured
in the start phase.





















































