
























3. ELECTRICAL INSTALLATION 11
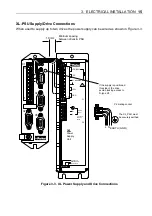
Supply Requirements
Power the ViX drives from DC supplies as specified below:
Volts
Drive Type
DC Supply Voltage
between DC+ and DC-
ViX500
48V to 80V (recommended)
ViX250
24V to 80V
Table 3-1. Drive Supply Voltages
WARNING
The drive HV supply input is not reverse polarity protected.
Reverse polarity connections will damage the drive.
Current and Capacitance
A supply must have a minimum amount of capacitance to support a drive at peak power
draw.
Drive Type
DC Supply Current
Supply Capacitance
ViX500
6.3A RMS
6600
µ
F
ViX250
2.5A RMS
3300
µ
F
Table 3-2. Drive Supply Currents
+24V Requirements
Both drive types require a +24V controller and logic supply. The supply to each drive should
be fitted with a time-delay fuse, rated at 3A. Note: The +24V supply used must meet the
voltage requirement specification of +24V DC +10% -15%, ripple <1V p-p.
The supply may also be required for an encoder and motor brake.
Absolute voltage range
20 to 27V
Nominal drive current
250mA (excluding encoder & brake)
Extra encoder current
150mA
Extra brake current
500mA
Safety Earth Requirements
Earth the drive using the earth pin on X1 (pin 8). Also earth the power 0V connector on
pin 9.
Summary of Contents for ViX250AE
Page 2: ......
Page 57: ...50 VIX AE SERVO DRIVE USER GUIDE...
Page 123: ...116 VIX AE SERVO DRIVE USER GUIDE...
Page 135: ......







































































