
























– B31 –
– B30 –
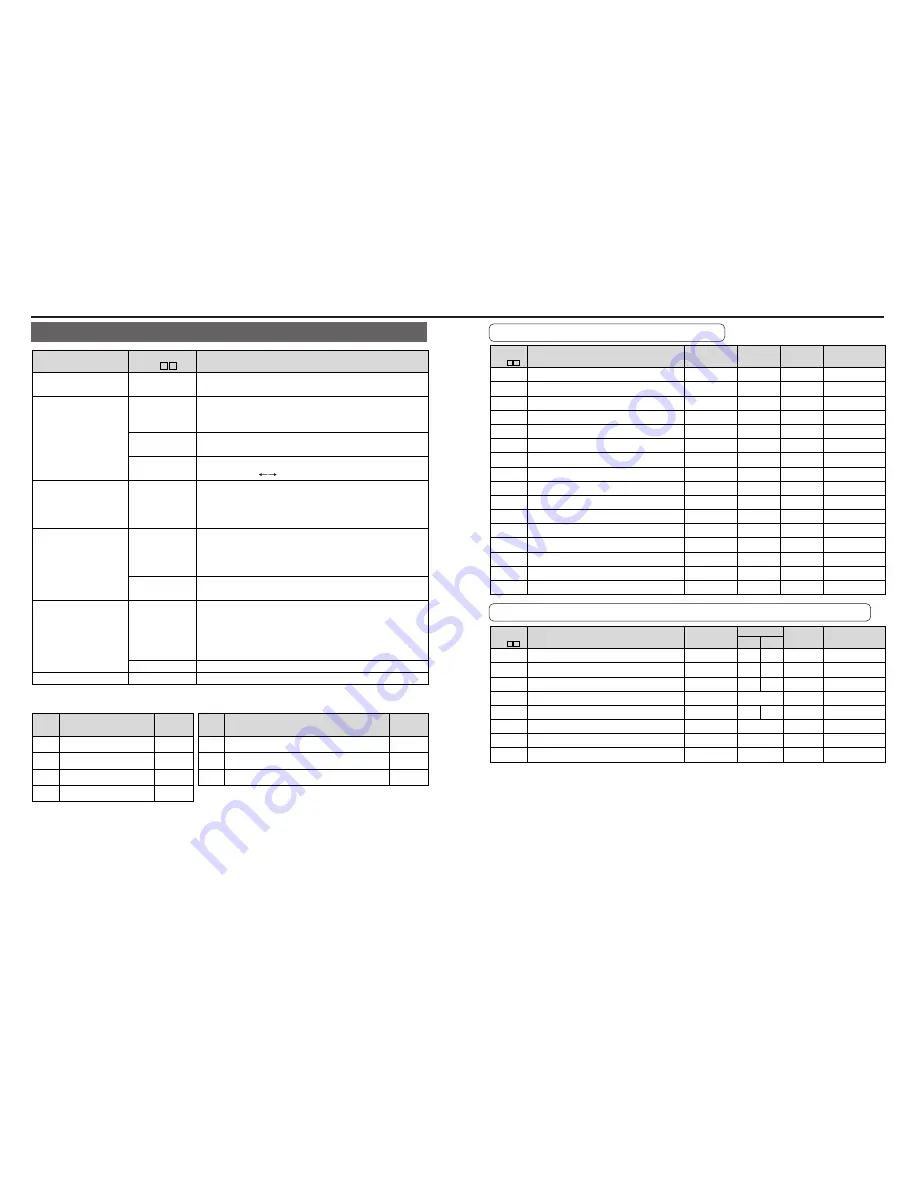
4. Parameter
Parameters for Functional Selection
<Notes>
• For parameters with suffix of "*1", change will be validated after the reset of the control power.
• For parameters which default values are parenthesized by "< >", default value varies
automatically by the real-time auto-gain tuning function. Set up Pr21 (Setup of Real-
time auto-gain tuning mode) to 0 (invalid) when you want to adjust manually.
* In this documentation, each mode is represented by the following symbols
P : Position control, S : Velocity control, T : Torque control, F : Full-closed control,
P/S : Position (1st),/Velocity (2nd) control, P/T : Position (1st)/Torque (2nd) control,
S/T : Velocity (1st)/Torque (2nd) control.
Set up of parameter
Range
Unit
Related control
mode
Parameter
No.
(Pr )
Default
00
*
1
01
*
1
02
*
1
03
04
*
1
05
06
07
08
09
0A
0B
*
1
0C
*
1
0D
*
1
0E
*
1
0F
0 to 15
0 to 17
0 to 6
0 to 3
0 to 2
0 to 3
0 to 2
0 to 9
0 to 12
0 to 8
0 to 8
0 to 2
0 to 5
0 to 5
0 to 1
–
1
1
1
1
1
0
0
3
0
0
1
1
2
2
0
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
–
all
all
all
P, S, F
all
S
S, T
all
all
all
all
all
all
all
all
–
Address of axis
Initial display of LED
Setup of control mode
Selection of torque limit
Setup of over-travel inhibit input
Switching of Internal/External speed setup
Selection of ZEROSPD input
Selection of speed monitor (SP)
Selection of torque monitor (IM)
Selection of TLO output
Selection of ZSP output
Setup of absolute encoder
Baud rate setup of RS232
Baud rate setup of RS485
Setup of front panel lock
(For manufacturer's use)
Parameters for Adjustment of Time Constant for Gains and Filters
Set up of parameter
Range
Unit
Related control
mode
Parameter
No.
(Pr )
Default
10
11
12
13
14
15
16
17
0 to 3000
1 to 3500
1 to 1000
0 to 5
0 to 2500
–
2000 to 2000
0 to 6400
–
<63> <32>
<35> <18>
<16> <31>
<0>
<65> <126>
<300>
<50>
–
1/s
Hz
ms
–
0.01ms
0.1%
0.01ms
–
P, F
all
all
all
all
P, F
P, F
–
1st gain of position loop
1st gain of velocity loop
1st time constant of velocity loop integration
1st filter of velocity detection
1st time constant of torque filter
Velocity feed forward
Time constant of feed forward filter
(For manufacturer's use)
A to
C-frame
D to
F-frame
Composition and List of Parameters
Group
Outline
Parameter No.
(Pr )
Functional selection
Adjustment
Position (Step)
Control
Velocity Control,
Torque Control
Sequence
Full-Closed Control
00 to 0F
10 to 1F,
27 to 2E
20 to 26, 2F
30 to 3F
40 to 4F
50 to 5A,
74 to 77
5B to 5F
60 to 6F
70 to 73
78 to 7F
You can select a control mode, designate I/O
signals and set up a baud rate.
You can set up servo gains (1st and 2nd) of
position, velocity, integration, etc, and time
constants of various filters.
Parameters related to Real Time Auto-Gain Tuning. You
can set up a mode and select a mechanical stiffness.
You can set up parameters related to gain
switching(1st 2nd)
You can set up an input form, directional selection
of command pulses, dividing of encoder output
pulse and set up a division multiplier ratio of
command pulse.
You can set up an input gain of command pulse,
reverse polarity and adjust offset. You can also set
up internal speeds (1 to 8th speed), acceleration/
deceleration time.
You can set an input gain, reverse polarity and set
up a torque limit of torque command.
You can set up detecting conditions of output signals,
such as positioning-complete and zero-speed.
You can also set up a deceleration/stop action at
main power-off, at alarm output and at servo-off,
and clear condition of the deviation counter.
You can set up actions of protective functions.
You can set up dividing of external scale.
• In this document, following symbols represent each mode.
* When you select the combination mode of 3, 4 or 5, you can select either 1st or 2nd
with control mode switching input (C-MODE).
when C-MODE is open : 1st mode selection
when C-Mode is closed: 2nd mode selection
Do not enter the command 10ms before/after the switching.
P
S
T
F
Symbol
0
1
2
6
Position control
Velocity control
Torque control
Full-Closed control
Control mode
P/S
P/T
S/T
Symbol
3*
4*
5*
Setup value
of Pr02
Position (1st)/Velocity (2nd) control
Position (1st)/Torque (2nd) control
Velocity (1st)/Torque (2nd) control
Control mode
Setup value
of Pr02







































































