





























28
Oxford Technical Solutions
If the RT-Strut is being used to mount the in the vehicle then
NAVconfig will have to be used to configure the orientation or the
will not work correctly. Page 52 gives more information on configuring the
orientation of the in a vehicle.
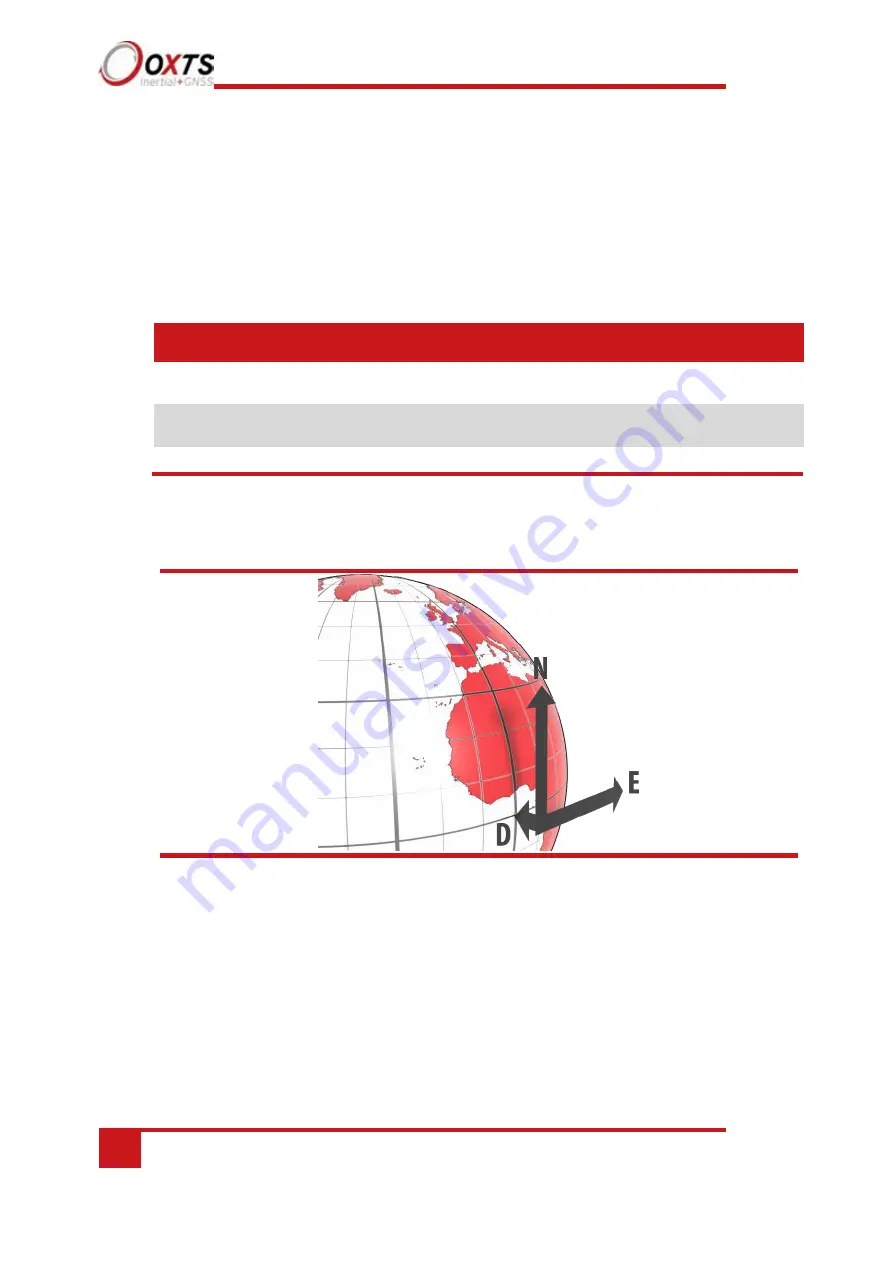
OxTS NED navigation frame
Table 12. OxTS NED navigation frame definition
North
The north axis (N) is perpendicular to the gravity vector and in the direction
of the North Pole along the earth’s surface.
Down
The down axis (D) is along the gravity vector.
Figure 5. OxTS NED navigation frame definition
The OxTS navigation frame is attached to the vehicle but does not rotate with it. The down
axis is
always aligned to the gravity vector and north always points north.
The east axis (E) is perpendicular to gravity, perpendicular to the north axis and is in
the east direction.
East
Axis
Description
Summary of Contents for Survey+ v3
Page 64: ...64 Oxford Technical Solutions ...
Page 100: ......
Page 101: ......
Page 102: ......
Page 103: ......







































































