





























Chapter 6: Acuity Localization
by a row of lights. This will cause the AMR to think it is one row of lights from where it really
is, so it will not be able to drive to goals, and might drive into forbidden zones.
NOTE:
Even with laser localization disabled, the laser stays active for obstacle
avoidance, so the AMR will not run into physical objects.
After the initial localization, the AMR will continuously verify and adjust its position on the
map as it moves through the environment.
Interpreting Light Objects on the Map
Lights are represented by light blue rectangles. If lights do not appear on the map, enable their
display by using the Map > Map Data > Light Items menu item in MobilePlanner.
From Map > Robot Data > Other Robot Data,
l
LightMatch compares the lights that an AMR has detected with its camera to the lights
on the map. Light matches are displayed in green.
l
LightMisses shows lights that are seen by the camera and meet the criteria for a proper
light, but which do not match a known light on the map. Light misses are displayed in
magenta.
l
Lights3d displays all lights in red, regardless of their match or miss status. Generally
this is left off to prevent cluttering the display.
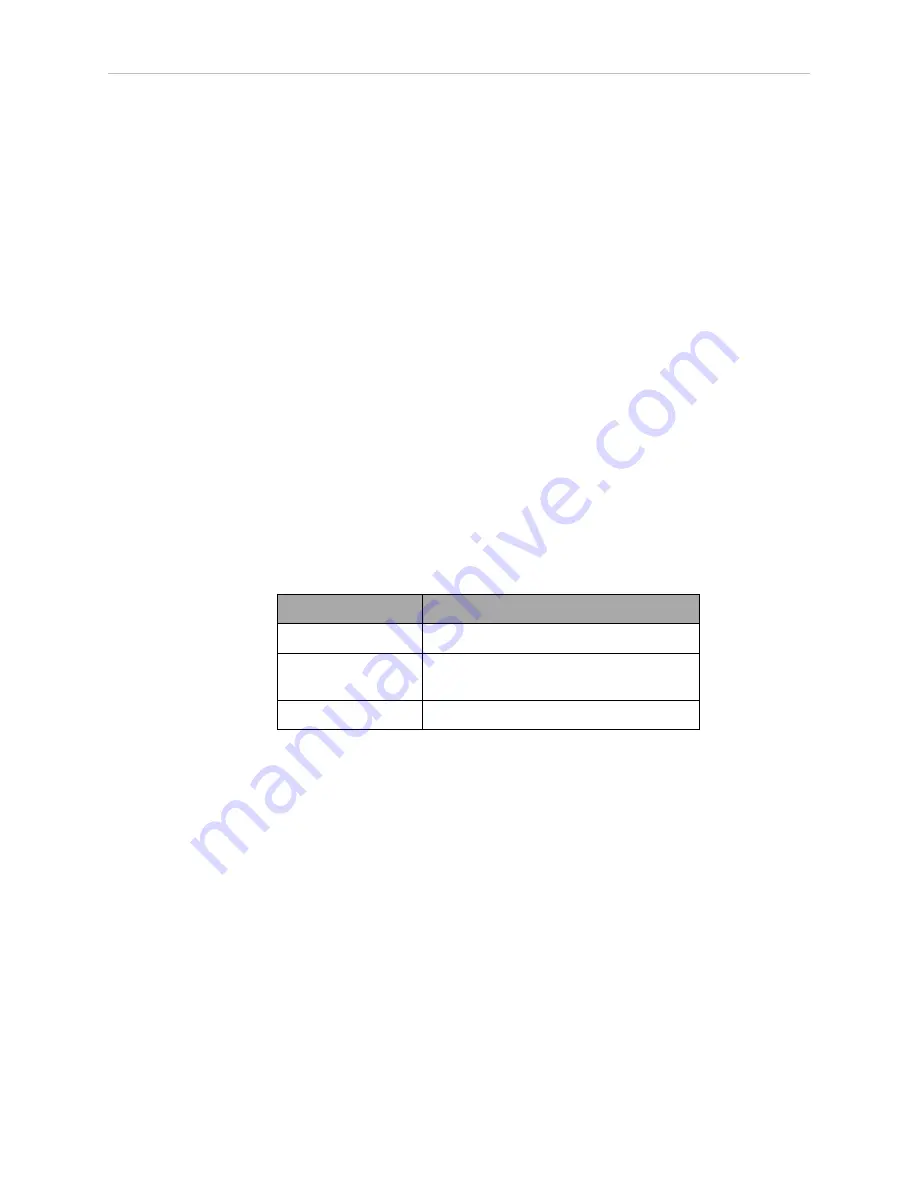
6.7 Camera Specifications
Feature
Specification
Field of View
140°
Power Input
12 VDC (±10%) supplied from platform,
through power connector
Power Consumption 3.3 W maximum
13732-000 Rev J
LD Platform Peripherals Guide
115







































































