





























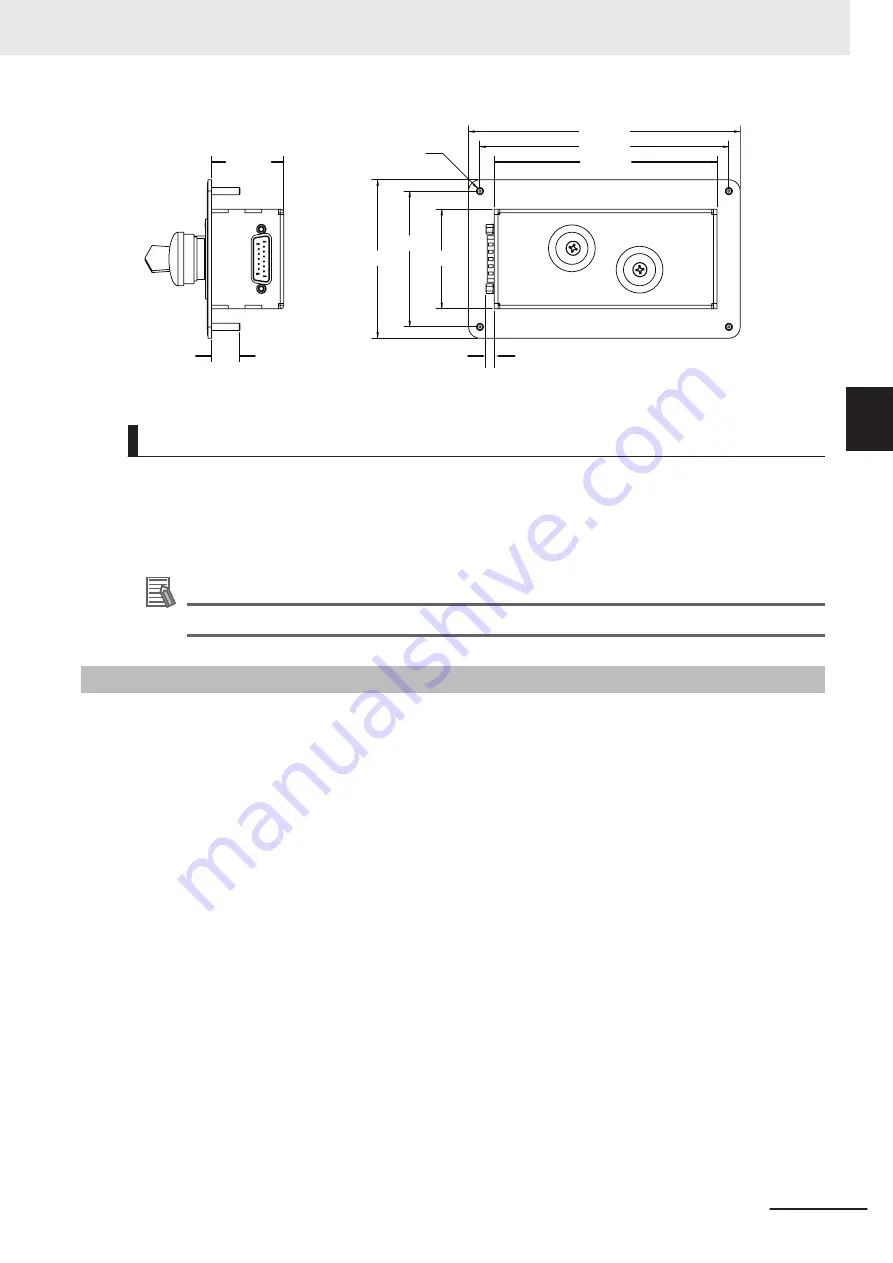
56 mm
76 mm
89 mm
125 mm
152 mm
140 mm
41 mm
16 mm
Ø 4 mm
5 mm
Front Panel Connections
The Front Panel is connected directly to the XFP connector on the XSYSTEM cable with the 3 m ex-
tension cable supplied with the Front Panel.
• The part number of the extension cable is 10356-10500.
• The length of the extension cable is 3 m.
Additional Information
Refer to
on page 3-37 for more information.
3-8-2
Safety Circuits
The XSYSTEM cable provides connections for all emergency stop circuits. All emergency stop circuits
are dual-channel and voltage-free. These voltage-free contacts are provided by a redundant, cyclical-
ly-checked, positive-drive, safety relay circuit for Category 3 PL-d per ISO 13849 operation.
The XUSR connector provides access to the following safety circuits.
• Dual channel emergency stop inputs.
• Dual channel emergency stop status outputs.
• Dual channel muted safety gate inputs.
• Dual channel Automatic / Manual mode status outputs.
The XFP connector provides access to the following safety circuits that are typically used with the
Front Panel.
• Dual channel emergency stop inputs.
• Dual channel Automatic / Manual mode selection inputs.
• High power indicator output.
• High power enable input.
• Control power indicator output.
The XMCP connector provides access to the following safety circuits that are use with a connected
Teach Pendant.
• Dual channel E-stop button inputs.
• Dual channel pendant enable switch inputs.
Use the diagram below to understand safety circuits.
3 Installation
3-35
i4L Robots with EtherCAT User's Manual (I659)
3-8
Installing Safety Equipment
3
3-8-2
Safety Circuits
Summary of Contents for i4-350L
Page 1: ...i4L Robots with EtherCAT User s Manual i4 350L i4 450L i4 550L I659 E 01...
Page 6: ...Manual Information 4 i4L Robots with EtherCAT User s Manual I659...
Page 54: ...1 Overview 1 26 i4L Robots with EtherCAT User s Manual I659...
Page 72: ...2 Specifications 2 18 i4L Robots with EtherCAT User s Manual I659...
Page 122: ...3 Installation 3 50 i4L Robots with EtherCAT User s Manual I659...
Page 138: ...4 Operation 4 16 i4L Robots with EtherCAT User s Manual I659...
Page 169: ...I Index I 1 i4L Robots with EtherCAT User s Manual I659 I...
Page 172: ...Index I 4 i4L Robots with EtherCAT User s Manual I659...
Page 173: ......
































































