













1.3 Workcell Layout
You must read the Robot Installation and Operation chapters in the
Cobra 350 Robot User's
Guide
for information on safe operation of your robot system, and the
Robot Safety Guide
.
Refer to Installing User-Supplied Safety Equipment in the System Installation chapter of the
Cobra 350 Robot User's Guide
, which provides details on connecting a user-designed E-Stop sys-
tem to the XUSR connector on the robot.
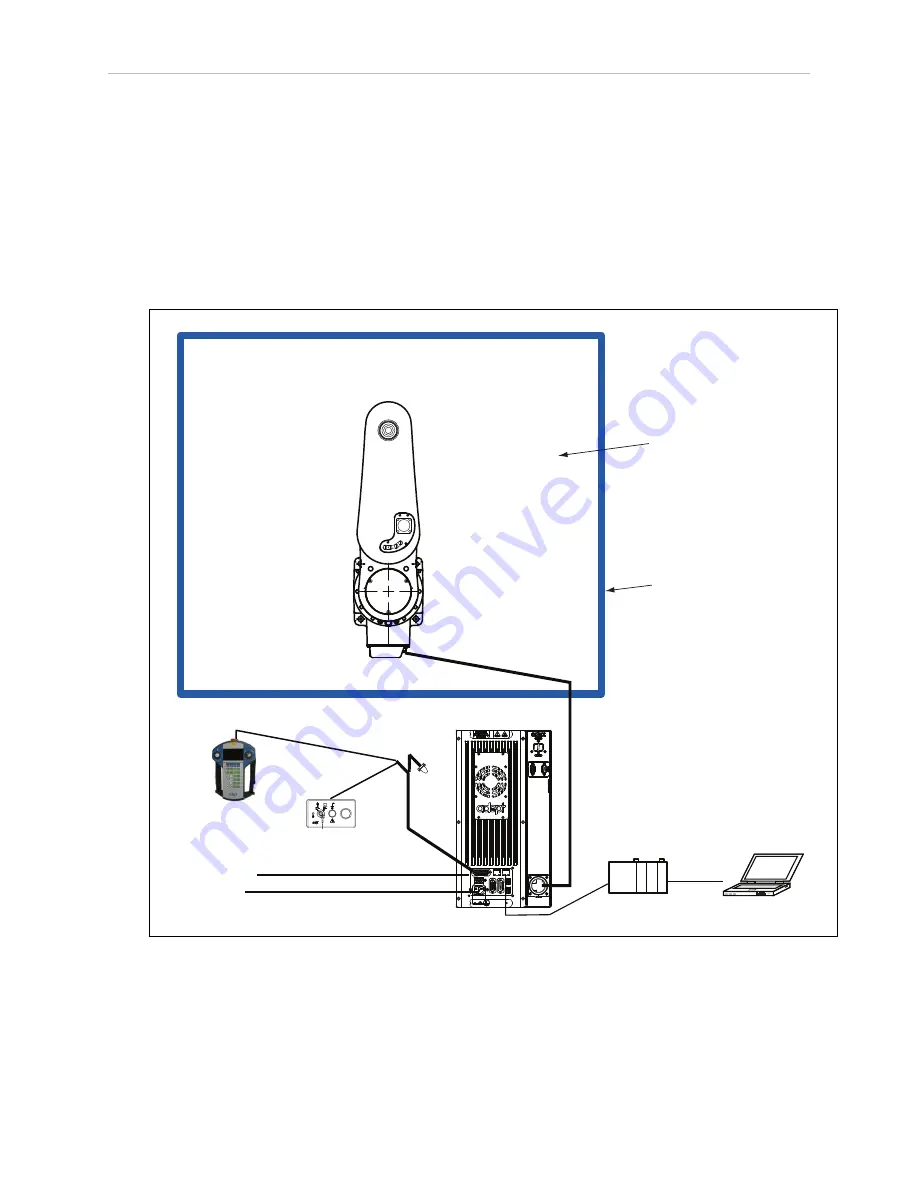
1.3 Workcell Layout
The following figure shows a simple workcell layout with a user-supplied safety barrier and
E-Stops provided by the Front Panel and optional T20 pendant.
DC
IN
24V
GND
AC
200 -
240V
Ø
1
XBEL
TIO
XIO
Servo
ENET
ENET
XSYSTEM
Front Panel
T20 Pendant -
Optional
PC running
PLC Programming
Software
Safety Barrier
Restricted Area
Inside Safety
Barrier
200-240 VAC
Cobra
ePLC350 Robot
24 VDC
XUSR
eMB-40R Amplifier
Programmable
Logic
Controller (PLC)
User-Supplied
Components
STOP
R
Figure 1-1. Typical Workcell Layout
Cobra ePLC350 Quick Setup Guide, 13590-000 Rev D
Page 4 of 14
Summary of Contents for Cobra 350 ePLC
Page 1: ...I592 E 01 Cobra 350 ePLC Robot Quick Setup Guide ...
Page 13: ......







































































