





























3- 9 Digital Filter
3- 9 Digital Filter
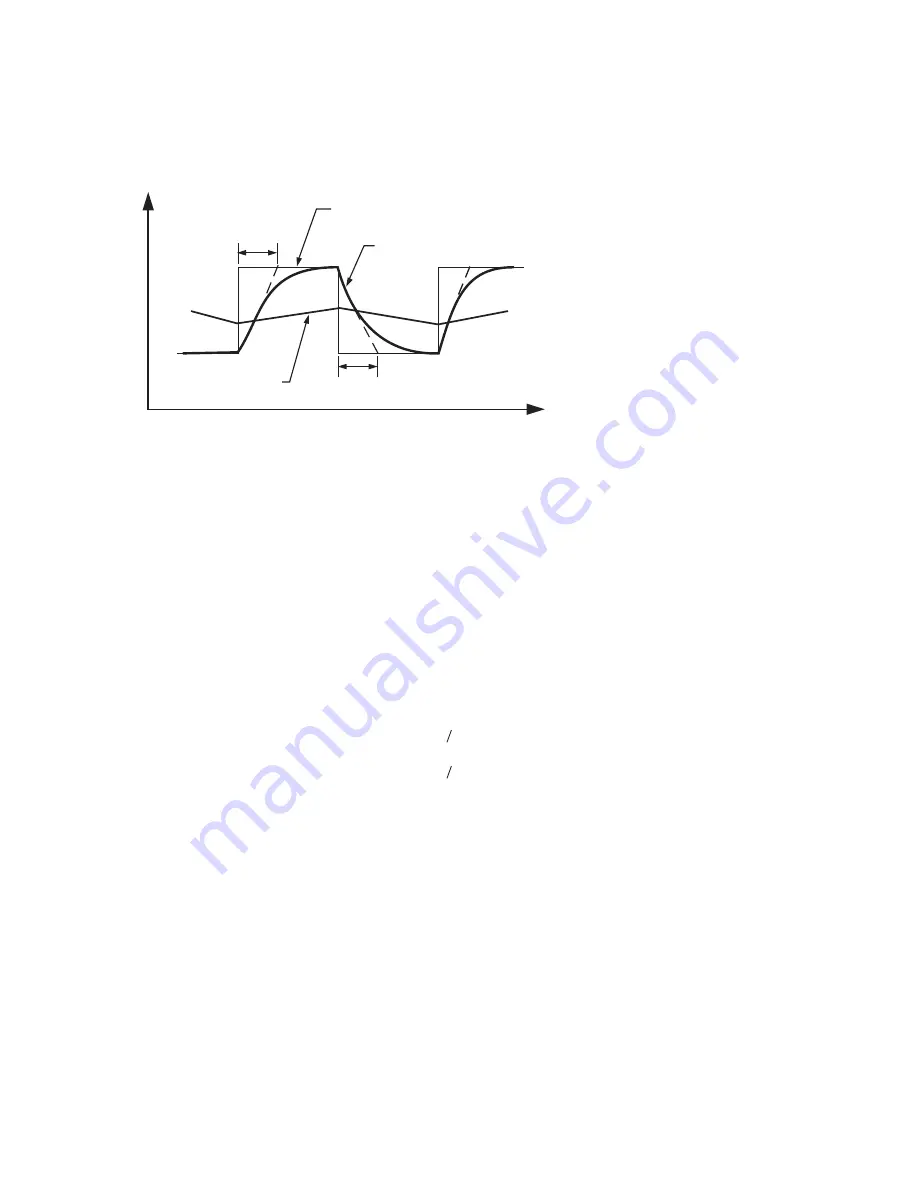
In certain applications, the process value is too unstable to be read. To improve this, a programmable low pass filter
incorporated in the controller can be used. This is a first order filter with time constant specified by FILT parameter .
The default value of FILT is 0.5 sec. before shipping. Adjust FILT to change the time constant from 0 to 60 seconds. 0
seconds represents no filter is applied to the input signal. The filter is characterized by the following diagram.
In certain applications, the process value is too unstable to be read. To improve this, a programmable low pass filter
incorporated in the controller can be used. This is a first order filter with time constant specified by FILT parameter .
The default value of FILT is 0.5 sec. before shipping. Adjust FILT to change the time constant from 0 to 60 seconds. 0
seconds represents no filter is applied to the input signal. The filter is characterized by the following diagram.
Time
PV
1 sec
1 sec
1 sec
1 sec
FILT=30
FILT=0
FILT=1
Figure 3.8
Filter Characteristics
Figure 3.8
Filter Characteristics
The Filter is available only for PV, and is performed for the displayed value only. The controller is designed to use an
unfiltered signal for control even if a Filter is applied. A lagged ( filtered ) signal, if used for control, may produce an
unstable process.
The Filter is available only for PV, and is performed for the displayed value only. The controller is designed to use an
unfiltered signal for control even if a Filter is applied. A lagged ( filtered ) signal, if used for control, may produce an
unstable process.
Note:
25
3 -10 Failure Transfer
3 -10 Failure Transfer
The controller will enter failure mode as one of the following conditions occurs:
1.
occurs due to the input sensor break or input current below 1mA if 4-20 mA is selected or input voltage below
0.25V if 1-5 V is selected .
2.
occurs due to the A-D converter of the controller fails.
SBER
ADER
The controller will enter failure mode as one of the following conditions occurs:
1.
occurs due to the input sensor break or input current below 1mA if 4-20 mA is selected or input voltage below
0.25V if 1-5 V is selected .
2.
occurs due to the A-D converter of the controller fails.
SBER
ADER
The output 1 and output 2 will perform the failure transfer function as the controller enters failure mode.
The output 1 and output 2 will perform the failure transfer function as the controller enters failure mode.
Output 2 Failure Transfer, if activated, will perform :
1. If OUT2 is configured as COOL, and BPLS is selected for O2FT, then output 2 will perform bumpless transfer.
Thereafter the previous averaging value of MV2 will be used for controlling output 2.
2. If OUT2 is configured as COOL, and a value of 0 to 100.0 % is set for O2FT,
then output 2 will perform failure transfer. Thereafter the value of O2FT will be used for controlling output 2.
3. If OUT2 is configured as alarm function, and OFF is set for O2FT, then
output 2 will transfer to off state, otherwise, output 2 will transfer to on state if ON is set for O2FT.
Output 2 Failure Transfer, if activated, will perform :
1. If OUT2 is configured as COOL, and BPLS is selected for O2FT, then output 2 will perform bumpless transfer.
Thereafter the previous averaging value of MV2 will be used for controlling output 2.
2. If OUT2 is configured as COOL, and a value of 0 to 100.0 % is set for O2FT,
then output 2 will perform failure transfer. Thereafter the value of O2FT will be used for controlling output 2.
3. If OUT2 is configured as alarm function, and OFF is set for O2FT, then
output 2 will transfer to off state, otherwise, output 2 will transfer to on state if ON is set for O2FT.
Output 1 Failure Transfer, if activated, will perform :
1. If output 1 is configured as proportional control ( PB=0 ), and BPLS is selected for O1FT, then output 1 will perform
bumpless transfer. Thereafter the previous control output value (MV1) will be used for controlling output 1.
2. If output 1 is configured as proportional control ( PB=0 ), and a value of 0 to 100.0 % is set for O1FT, then output 1
will perform failure transfer. Thereafter the value of O1FT will be used for controlling output 1.
3. If output 1 is configured as ON-OFF control ( PB=0 ), then output 1 will transfer to off state if OFF is set for O1FT
and transfer to on state if ON is set for O1FT.
Output 1 Failure Transfer, if activated, will perform :
1. If output 1 is configured as proportional control ( PB=0 ), and BPLS is selected for O1FT, then output 1 will perform
bumpless transfer. Thereafter the previous control output value (MV1) will be used for controlling output 1.
2. If output 1 is configured as proportional control ( PB=0 ), and a value of 0 to 100.0 % is set for O1FT, then output 1
will perform failure transfer. Thereafter the value of O1FT will be used for controlling output 1.
3. If output 1 is configured as ON-OFF control ( PB=0 ), then output 1 will transfer to off state if OFF is set for O1FT
and transfer to on state if ON is set for O1FT.







































































