





















3.10 CAN interface
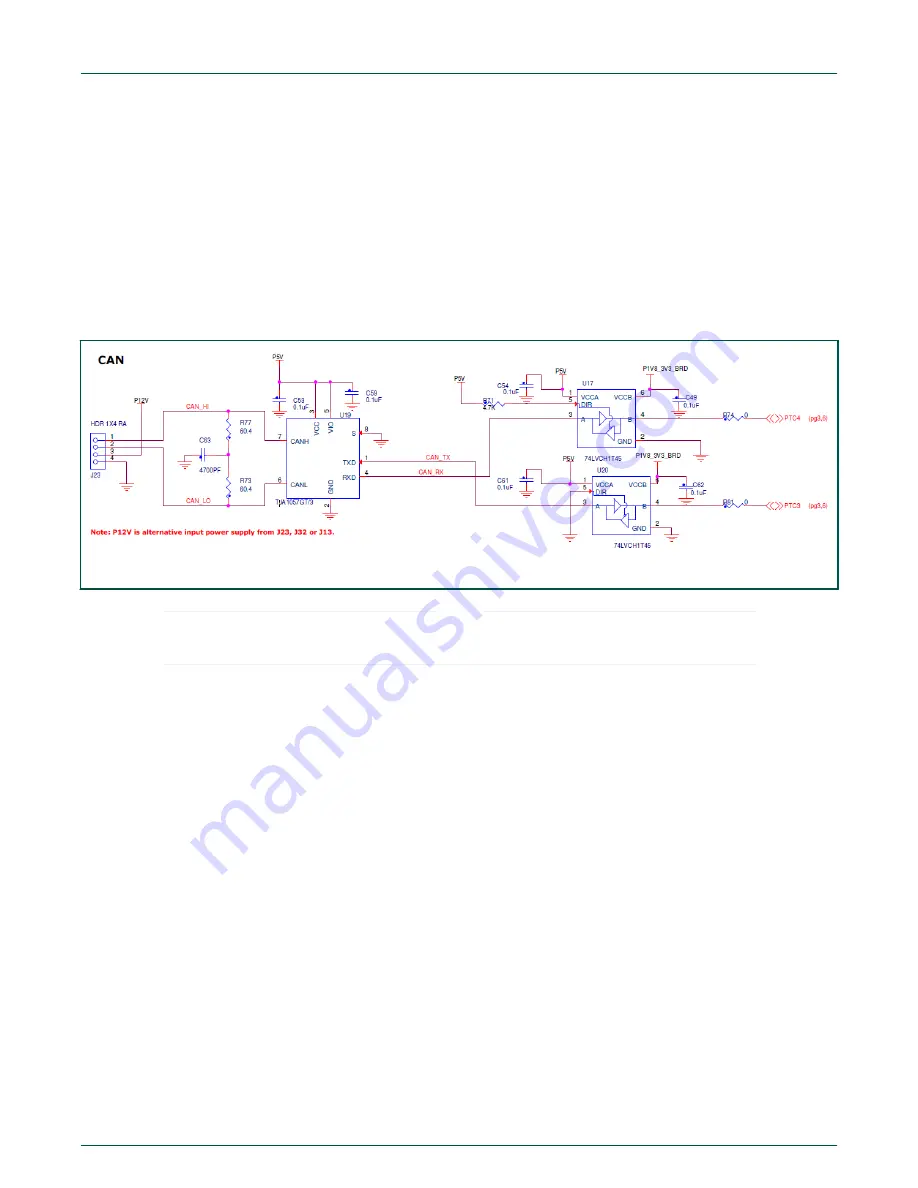
U19 is the NXP TJA1057 high speed CAN transceiver. It provides an interface between a Controller Area Network (CAN) protocol
and the physical two-wire CAN bus. The transceiver is designated for high speed CAN applications in the automotive industry,
providing the differential transmit and receive capability to a CAN protocol controller.
shows the CAN Interface circuit.
• The TJA1057 power supply is P5V coming from the U15 (regulator) device.
• J23 provides pins to interface with a CAN bus.
• Pin 3 of J23 can be used to power other FRDM-KW36 boards.
• Pin 3 of J23 can be also used as an input to power the FRDM-KW36.
• CAN Interface is only functional if board is powered through the P12V signal which is supplied through J32, J23 or J13.
Figure 25. CAN interface circuit
Components U17 and U20 are level shifters to translate voltage level between KW36 and the NXP TJA1057
transceiver.
NOTE
3.11 LIN interface
U10 is the NXP TJA1027 LIN 2.2A/SAE J2602 transceiver. It is the interface between the Local Interconnect Network (LIN)
master/slave protocol controller and the physical bus in a LIN network. It is primarily intended for in-vehicle sub-networks using
baud rates up to 20 kBd and is compliant with LIN 2.0, LIN 2.1, LIN 2.2, LIN 2.2A and SAE J2602.
Interface circuit.
• The TJA1027 power supply is P12V_VBAT coming from P12V.
• J13 provides pins to interface with a LIN network.
• Pin 2 of J13 can be used to power other FRDM-KW36 boards.
• Pin 2 of J13 can be also used as an input to power the FRDM-KW36.
• LIN Interface is only functional if board is powered through the P12V signal which is supplied through J32, J23 or J13.
NXP Semiconductors
Functional description
FRDM-KW36 Freedom Development Board User’s Guide, Rev. 4, 01/2020
User's Guide
21 / 28