STEP 4
HOOK-UP INSTRUCTIONS
Refer to Quick Set-Up photos on front
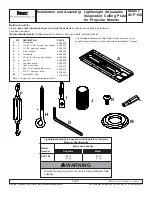
1. INSTALL MOTOR CAPACITORS
Electric motors generate radio noise that can interfere
with your receiver and cause radio problems. Included
in the ESC accessory kit are three 0.1
µ
F (50V) non-
polarized, ceramic capacitors. These capacitors must
be installed on every motor to help reduce the noise
generated by the motor and to prevent ESC damage.
Solder 0.1
µ
F (50V) capacitors between:
• POSITIVE (+) motor tab & NEGATIVE (
-
) motor tab.
• POSITIVE (+) motor tab & GROUND tab*.
• NEGATIVE (
-
) motor tab & GROUND tab*.
*If your motor does not have a ground tab, solder the capacitor
leads to the can of the motor as shown below.
Negative (-) motor tab
0.1
µ
F Capacitors
Positive (+) motor tab
Ground / motor can
Extra 0.1
µ
F capacitors are available in Novak kit #5620
2. IMPORTANT NOTE ABOUT SCHOTTKY DIODES
NO SCHOTTKY DIODES
Schottky diodes must NOT be used with reversible
speed controls. Using a Schottky diode will damage
the speed control and will void the warranty.
3. CONNECT SPEED CONTROL TO THE RECEIVER
After the proper input plug plastic has been installed
to match the receiver (Refer to Step 1), plug the speed
control into the
THROTTLE CHANNEL
of the receiver.
4. CONNECT SPEED CONTROL TO THE BATTERY PACK
ROOSTER––Plug the JST/Tamiya connector from speed
control into a 6 or 7 cell battery pack (1.2 volts DC/cell).
*Removal of JST/Tamiya connector voids warranty.
SUPER ROOSTER––Cut the
BLACK
wire of ESC to the
desired length and strip about 1/4” of insulation off
the end. Solder to the
negative
side of a completely
charged 6 to 10 cell battery pack (1.2 volts DC/cell).
Cut the
RED
wire of ESC to the desired length and
strip about 1/4” of insulation off the end. Solder to the
positive
side of the battery pack.
5. CONNECT SPEED CONTROL TO THE MOTOR
ROOSTER––Plug the bullet connector on the
YELLOW
wire of speed control to motor
positive
.
Plug the bullet connector on the
BLUE
wire of speed
control to motor
negative
.
SUPER ROOSTER––Cut the
BLUE
wire of ESC to the
desired length and strip about 1/4” of insulation off
the end. Solder to the
negative
tab of the motor.
Cut the
YELLOW
wire of speed control to the desired
length and strip about 1/4” of insulation off the end.
Solder to the
positive
tab of the motor.
TIP:
Twist BLUE & YELLOW motor wires once or twice as they go to
the motor to reduce any radio noise emitted from power wires.
6. USING PLUGS FOR BATTERY & MOTOR CONNECTION
High-quality/low-resistance connector plugs, such as
Dean’s Ultra Plugs, can also be used to connect the
Super Rooster. While these connectors make compo-
nent changes quick and easy, the connection will never
have the low resistance of a good solder joint.
Use connectors that can not be connected backwards,
as this will damage the ESC and void the warranty.
It is good practice to use a female connector on battery
to keep from short-circuiting on conductive surfaces.
If you use connector plugs for battery and motor, use
a male connector on the ESC battery wires and a female
connector on the motor wires. Doing this, will avoid
plugging the battery into the motor output of the ESC.
TROUBLE-SHOOTING GUIDE
ESC Will Not Program Properly
• Too little transmitter throw––Increase ATV/EPA setting.
• Make sure ESC is plugged into the throttle channel of
receiver. Check throttle channel operation with a servo.
• ESC SET button not held long enough––Press and hold
SET button until status LED turns solid red.
ESC Will Not Go In Reverse
• Reverse circuitry disabled––Refer to Step 7 to enable.
Steering Channel Works But Motor Will Not Run
[Status
LED
is
solid RED
at all throttle positions]
• No signal from receiver––Make sure speed control is
plugged into throttle channel of receiver. Check throttle
channel operation with a servo. Check the wiring color
sequence & metal socket insertion of receiver harness.
Steering Channel Works But Motor Will Not Run
[Status
LED
is
RED at neutral
/
GREEN at full
throttle]
• Check motor connections. Check motor and brushes.
Steering Channel Works But Motor Will Not Run
• Not programmed––Repeat programming.
• Thermal Shutdown––Allow to cool/Check for adequate
airflow through heat sinks.
• Check wiring and connections––Check operation of
system without speed control.
Receiver Glitches/Throttle Stutters During Acceleration
• Motor capacitors broken or missing––Refer to Step 4.
• Receiver or antenna too close to speed control, power
wires, battery, or motor––Refer to Step 2.
• Bad connections––Check wiring and connectors.
• Graphite or Aluminum Chassis––Refer to Step 2.
• Excessive current to motor––Use a milder motor or a
smaller pinion gear.
ESC Is Melted Or Burnt/ESC Runs With Switch Off
• Internal damage––Refer to Service Procedures.
*For more help call our Customer Service Department.
SERVICE PROCEDURES
Before sending in your speed control for service, review
the Trouble-Shooting guide and the instructions. The ESC
may appear to have failed when other problems exist.
PLEASE NOTE:
Speed controls that operate normally
when received will be charged a minimum service fee
and return shipping costs.
WHAT TO SEND: Fill out all information requested on the
enclosed
REVERSIBLE ESC SERVICE CARD
(service card also
available on our website)
and return it with speed control.
WARRANTY WORK: For warranty work, you MUST CLAIM
WARRANTY on the
REVERSIBLE ESC SERVICE CARD
and
include a valid cash register receipt with purchase date on
it, or an invoice from previous service work. If warranty
provisions have been voided there will be a service charge.
SERVICE COSTS: Customer is responsible for all service
costs (parts, labor, and shipping/handling charges). Speed
controls will be returned by UPS/COD CASH ONLY. See
SERVICE CARD
for other payment and shipping options.
ADDITIONAL NOTES:
• Hobby dealers/distributors are not authorized to replace
speed controls thought to be defective.
• If a hobby dealer sends your speed control for service,
submit a completed
REVERSIBLE ESC SERVICE CARD
to
the dealer and make sure it is sent with the speed control.
• Novak Electronics, Inc. does not make any electronic
components (transistors, resistors, etc.) available for sale.
• To provide the most efficient service possible to our
customers, it is not our policy to contact customers by
phone or mail.
PRODUCT WARRANTY
The Rooster/Super Rooster is guaranteed to be free from defects in
materials or workmanship for a period of 120 days from original date
of purchase (verified by dated, itemized sales receipt). Warranty does
not cover incorrect installation, components worn by use, damage
from using fewer than 6 or more than 7 cells(Rooster) or 10 cells(Super
Rooster) (1.2 volts DC/cell) input voltage, short-circuiting heat sinks,
cross-connection of the battery/motor, using the same-gender con-
nectors on ESC, removing JST/Tamiya connector or heat sink or us-
ing motors with fewer than 16 turns with Rooster, reverse voltage
application, damage resulting from thermal overload, damage from
excessive force while installing Super Rooster heat sinks, not installing
three 0.1
µ
F (50V) capacitors on motors, splices to input or switch
harnesses, damage from disassembling case or excessive force when
using SET button, tampering with internal electronics, allowing wa-
ter, moisture, or other foreign material to enter ESC or get onto PC
board, incorrect installation/wiring of alternate input plug plastic,
external receiver battery pack, or FET servo, allowing exposed wiring
to short-circuit, use of a Schottky diode, or any damage caused by
crash, flooding, or act of God.
In no case shall our liability exceed the product's original cost. We
reserve the right to modify warranty provisions without notice.
Because Novak Electronics, Inc. has no control over connection and
use of the ESC, no liability may be assumed nor will be accepted for
damage resulting from the use of this product. Every ESC is thor-
oughly tested and cycled before leaving our facility and is, therefore,
considered operational. By the act of connecting/operating ESC, the
user accepts all resulting liability.
CUSTOMER SERVICE
CUSTOMER SERVICE HOURS (PST)
Monday-Thursday: 8:00am-5:00pm
Friday: 8:00am-4:00pm
(closed every other Fri.)
(949) 833-8873 • FAX (949) 833-1631
©1998 Novak Electronics, Inc. • All Rights Reserved
No part of these operating instructions may be reproduced without the
written permission of Novak Electronics, Inc.
All Novak speed controls are designed and manufactured in the U.S.A.
Rooster Reversible™, Super Rooster Reversible™, HYPERFET III™, Polar
Drive Technology™, Radio Priority Circuitry™, One-Touch Set-Up™, Smart
Braking Circuitry™, Digital Anti-Glitch Circuitry™, Reverse Disable Cir-
cuitry™, and Input Plug System™ are all trademarks of Novak Electronics, Inc.
Printed in the U.S.A. 5/98 • #IM-1860-2
SUPER ROOSTER:
DUAL-MOTOR SET-UPS & RECOMMENDATIONS
STEP 5
TRANSMITTER ADJUSTMENTS
For proper speed control operation and programming
set transmitter adjustments as follows:
1.
Set
HIGH ATV
or
EPA
to
maximum
setting.
[Amount of throw at full throttle]
2.
Set
LOW ATV
,
EPA
, or
ATL
to
maximum
setting.
[Amount of throw at full brakes]
3.
Set
EXPONENTIAL
to
zero
or
middle
setting.
[Throttle channel linearity]
4.
Set
THROTTLE CHANNEL TRIM
to
middle
setting.
[Adjusts neutral position/Increases or decreases coast
brakes]
5.
Set
THROTTLE CHANNEL REVERSING SWITCH
to
either
position.
[Do not change switch position after programming]
6.
Set
ELECTRONIC TRIGGER THROW ADJUSTMENT
to
50% throttle
and
50% brake
throw (or 5:5).
[Adjusts pistol-grip transmitter’s throttle trigger throw on
electronic/digital transmitters]
7.
Set
MECHANICAL TRIGGER THROW ADJUSTMENT
to position with
1/2 throttle
and
1/2 brake
throw.
[Adjusts pistol-grip transmitter’s throttle trigger throw on
mechanical/analog transmitters]
STEP 6
SPEED CONTROL PROGRAMMING
Speed control should be connected to receiver and to a
charged battery pack, and the transmitter adjusted.
1. TURN ON THE TRANSMITTER
2. TURN ON THE SPEED CONTROL
3. PRESS AND HOLD SPEED CONTROL’S SET BUTTON
With transmitter throttle at neutral, press and hold the
ESC
SET
button until the status
LED
turns solid red
.
4. RELEASE ESC SET BUTTON WHEN LED IS RED
5. PULL TRANSMITTER THROTTLE TO FULL-ON POSITION
Hold it there until the status
LED
turns solid green
.
NOTE: The motor will not run during programming even if it
is connected to the speed control.
6. PUSH TRANSMITTER THROTTLE TO FULL-REVERSE
Hold it there until the status
LED
blinks green
.
7. RETURN TRANSMITTER THROTTLE TO NEUTRAL
Status
LED
will
turn solid red
, indicating that throttle is
at neutral and proper programming has been completed.
Speed control is programmed & ready to kick-up a roost
!
If transmitter settings are changed, it will be necessary to
complete the programming sequence once again.
If you experience any problems during programming, turn
off the speed control and repeat programming.
STEP 7
REVERSE DISABLE PROGRAMMING
Speed control should be connected to receiver and to a
charged battery pack, and the transmitter adjusted.
1. TURN ON THE TRANSMITTER
2. TURN ON THE SPEED CONTROL
3. PRESS AND HOLD SPEED CONTROL’S SET BUTTON
Press and hold the ESC
SET
button until the status
LED
turns from solid red to solid green
.
4. RELEASE ESC SET BUTTON WHEN LED IS GREEN
5. PRESS SET BUTTON TO ENABLE/DISABLE REVERSE
SLOW RED FLASH = REVERSE ENABLED
FAST RED FLASH = REVERSE DISABLED
Note: You must press the ESC SET button very soon after
the LED begins flashing red (slow or fast).
6. LED WILL TURN GREEN THEN EXIT PROGRAMMING
Green LED indicates ESC is exiting programming mode.
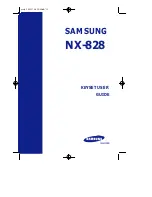
PARALLEL DUAL-MOTOR WIRING
This method gives you faster speeds but shorter run times.
1. YELLOW
wire from speed control goes to the positive
tab on the first motor.
2. YELLOW
wire then goes from the positive tab on the
first motor to the positive tab on the second motor.
3. BLUE
wire from the speed control goes to the negative
tab on the first motor.
4. BLUE
wire then goes from the negative tab on the first
motor to the negative tab on the second motor.
PARALLEL DUAL-MOTOR RECOMMENDATIONS
As with the series set-up, the motors that are designed
for running in dual configurations will give you optimum
performance and will minimize drive train wear.
Motors in parallel double the load on the speed control.
For this reason you should not run motors with fewer
turns than are available in a single motor. For example, if
the lowest number of turns you can get is an 8 turn motor,
each of your dual motors should be 15 or 16 turns.
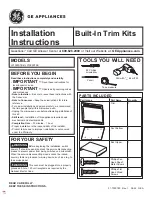
SERIES DUAL-MOTOR WIRING
This method gives you higher torque and longer run times.
1. YELLOW
wire from speed control goes to the positive
tab on the first motor.
2.
An extra piece of 14 gauge speed control wire then
goes from the negative tab on the first motor to the
positive tab on the second motor.
3. BLUE
wire from the speed control goes to the negative
tab on the second motor.
SERIES DUAL-MOTOR RECOMMENDATIONS
Special motors are available that are designed to be run
together. These motors will give optimum performance
and will also minimize the wear on your drive train.
Motors in series put the same load on the speed control
as the total number of turns in both motors. For this set-
up you can use motors with as few as 8 turns and the
speed control will think its driving a 16 turn motor. You
will get the speed and run times of a 16 turn motor with
twice as much torque that is needed for heavier models.
•ALWAYS USE IDENTICAL MOTORS•
(-)
(+)(-)
(+)
blue
wire
yellow
wire
(+)
(-)
blue
wire
yellow
wire
(-)
(+)
** Using Dual-Motors is Not recommended with the Rooster **