





























Commander S100 User Guide
61
P1.06
Output Current
Range:
± Drive Rated Current x 2.2 A
Default:
Read Only
This displays the total output current to the motor. This is made up of two components, motor magnetising current and motor
Torque Producing
Current
(P1.07).
P1.07
Torque Producing Current
Range: ± Drive Rated Current x 2.2 A
Default:
Read Only
This parameter displays the component of the
Output Current
(P1.06) that is in phase with the voltage and does not include the magnetising current
of the motor.
This torque includes the load torque and acceleration torque.
If the Output Frequency is positive (forward rotation), a positive value of Torque Producing Current would hold the motor load or cause the motor to
accelerate.
If the Output Frequency is negative (reverse rotation), a negative value of torque producing current would hold the motor load or cause the motor to
accelerate.
The value is proportional to the torque produced by the motor provided the frequency applied to the motor is at or below the motor rated frequency.
P1.08
Percentage Load
Range: ± Torque Current Maximum Limit %
Default:
Read Only
This indicates the load on the motor as a percentage of the motor rated torque.
For forward rotation, this value is positive for a motoring load and negative for a regenerating load. For reverse rotation this value is negative for a
motoring load and positive for a regenerating load.
Percentage
Load
(P1.08)
=
Torque
Producing
Current
(P1.07)
/
I
Trated
x 100
I
Trated
= Rated Torque Current =
Motor Rated Current (P3.01) x Motor Rated Power Factor (P3.04)
P1.09
Alarm Indicators
Range:
0
7
0
6
0
5
0
4
0
3
0
2
0
1
0
0
to 1
7
1
6
1
5
1
4
1
3
1
2
1
1
1
0
Default:
Read Only
An alarm is used by the drive to give an early warning of a problem which could lead to a drive error. The display will indicate an alarm condition by
flashing the display alarm indicators shown below. By default, in some alarm conditions, the drive may take action to prevent an error for example
reducing the motor current or speed.
Find additional information in Marshal or in section 9.1
P1.10
Drive Status Indicators
Range:
0
7
0
6
0
5
0
4
0
3
0
2
0
1
0
0
to 1
7
1
6
1
5
1
4
1
3
1
2
1
1
1
0
Default:
Read Only
Displays a set of drive status indicators.
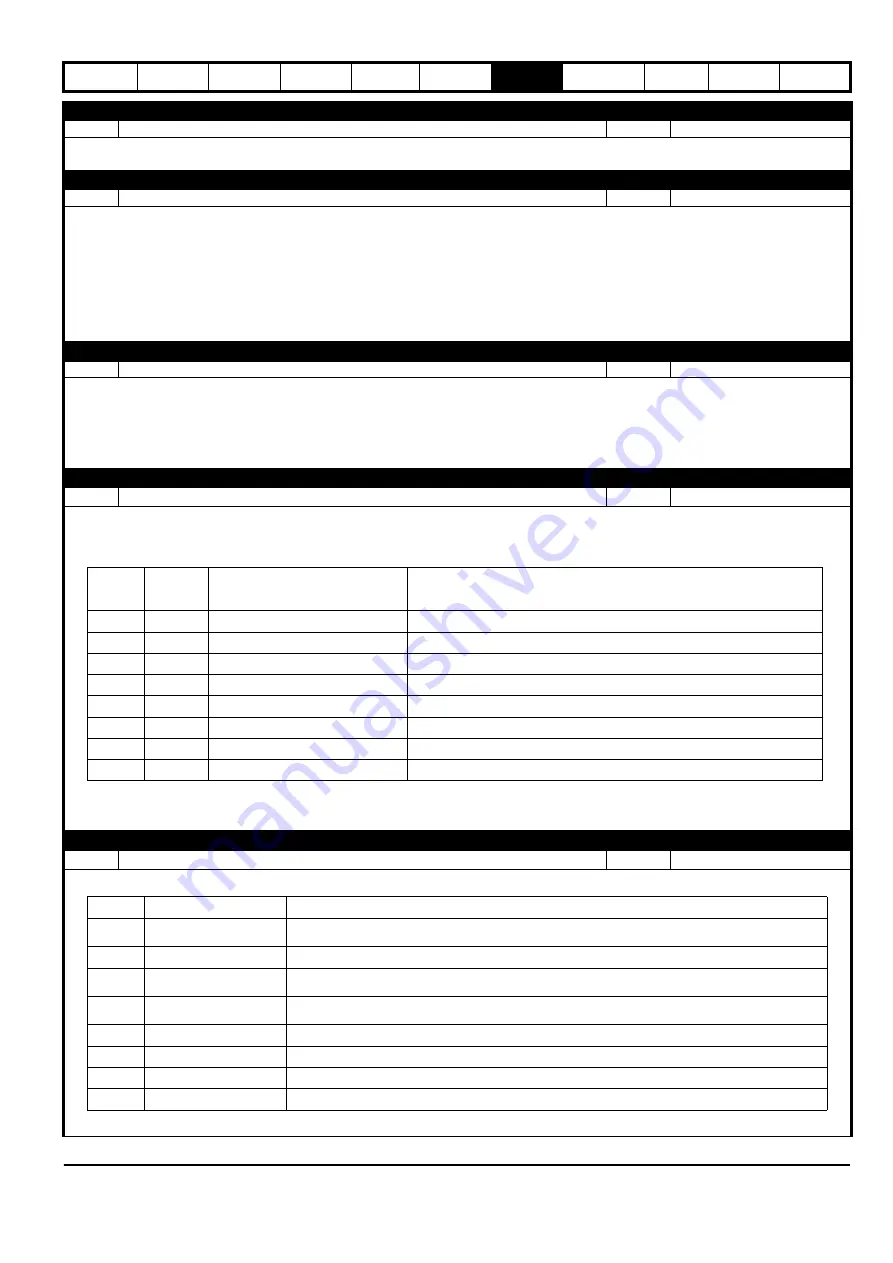
Bit
Display
Alarm
Indicator
Alarm
How to remove the alarm
Bit
0
A.0
Motor Overload
Reduce the load on the motor
Bit
1
A.1
Drive Overload
Reduce the load on the motor or ambient temperature of the drive
Bit
2
A.2
Auto-tune Active
Will be reset when Autotune complete
Bit
3
A.3
Limit Switch
Rotate the motor away from the limit switch
Bit
4
A.4
Supply Imbalance
Check supply fuses to the drive
Bit
5
A.5
Analog Current
Check current loop master is powered and the integrity of the wiring is good
Bit
6
A.6
Current Limit
Reduce the load on the motor
Bit
7
A.7
I/O
Overload
Check the 24 V output, digital output, and 485 port for an overload condition
Bit
Status
Description
Bit
0
Supply Loss
Indicates supply loss has been detected. The behaviour in this situation is controlled by
Supply Loss
Action
(P4.08).
Bit
1
Limit Switch Active
Indicates at least one limit switch is active.
Bit
2
Thermal Limit Active
Indicates the output current is being limited further than that defined by
Torque Current Limit
(P3.17)
for thermal protection of the motor.
Bit
3
Current Limit Active
Indicates the output current is being limited by the current limit defined by
Torque Current Limit
(P3.17) or Bit 2 above.
Bit
4
Drive Active
Indicates the drive is applying voltage to the motor.
Bit
5
Healthy
Indicates the drive is healthy and there are no errors.
Bit
6
At Speed
± 1 Hz
Indicates the
Ramp Output
(P1.14) is within 1 Hz of the Ramp Input.
Bit
7
At Zero ± 2 Hz
Indicates the
Ramp Output
(P1.14) is within 2 Hz of 0 Hz.
Summary of Contents for COMMANDER S100
Page 118: ...0478 0650 02...







































































