






















10
OSCILLATION RANGE (1040+/2040+ ONLY)
Oscillation is the sweeping motion of the robot’s head,
enabling the robot to deliver consecutive balls to different
spots on the table. Since Robo-Pong 545 has no oscillation
controls, the information on this page does not apply to the
545. Furthermore, the oscillator ranges given on this page
will apply to the 1040+ and 2040+ only when these models
are positioned so the robot head is aligned with the center-
line of the table (Position 1 or 5, Figure 15, page 12).
Models 1040+ and 2040+ have 8 selectable ranges (or
zones) in which the robot head will sweep, delivering balls
randomly within that zone. These zones are regulated by
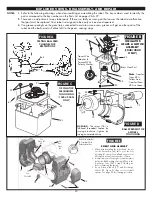
the Control Levers at the back of the robot (see Figure 9).
Ranges are identified on a label at the top of the robot (see
Figure 10). Figure 10A further clarifies these ranges.
Zones are selected by moving a Control Lever into the
desired position as indicated by the number that appears
through the hole in the Control Lever (see Figure 9). The
Right Control Lever is restricted to positions 1, 2, & 3; the
left to positions 4, 5, & 6. (Left and right designations for
the robot are given as if you are facing the robot.)
To move a lever, lift it up with your finger, move it to
the desired position, and then release it. If the lever will
not move easily, pick up the lever and move the Control
Lever Adapter instead. To access the Control Levers on the
2040+, open the slot in the back of the net by pulling the
velcro apart and reach with your fingers through the slot to
touch the Control Levers.
WARNING: DO NOT adjust the Control Levers while the
head is moving. Also do not move both levers at the same time.
Move one, then the other. Failure to follow these instructions will
likely result in broken parts and may void your warranty.
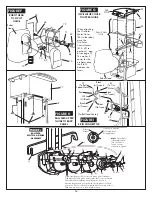
Following is an explanation of each zone that can be
selected as shown in Figures 10 and 10A:
3,4—Robot delivers balls across the entire table, from
corner to corner (whole table).
3,5—Robot delivers balls from player’s left corner to
middle of right court (
3/
4
table).
2,4—Robot delivers balls from player’s right corner to
middle of left court (
3/
4
table).
1,4—Robot delivers balls from player’s right corner to
centerline (
1/
2
table).
3,6—Robot delivers balls from player’s left corner to
centerline (
1/
2
table).
2,5—Robot delivers balls from middle of player’s right
court to middle of left court (
1/
2
table).
1,5—Robot delivers balls from middle of player’s right
court to centerline (
1/
4
table).
2,6—Robot delivers balls from middle of player’s left
court to centerline (
1/
4
table).
1,6—No oscillation. Place Control Levers in these posi-
tions whenever you transport or ship your robot, to pre-
vent damage to the oscillator mechanism.
If you want stationary delivery, adjust the Control
Levers to 3,4 and turn oscillator speed on. When the robot
head points to the desired landing spot on the table, turn
Oscillator Speed off. Failure to set the levers to 3,4 may
result in “head drift”, which causes the landing spot to
change even though the oscillator is turned off.
SWEEP CONTROL ADJUSTMENT
2-4
3-4
1-4
3-6
2-5
1-5 2-6
3-5
OSCILLATOR RANGES
OF ROBOT WITH
CONTROL LEVERS IN
VARIOUS POSITIONS
AND ROBOT ALIGNED
WITH CENTERLINE OF
TABLE
(1040+/2040+ ONLY)
FIGURE 10A
SWEEP ADJUSTMENT LABEL
(1040+/2040+ ONLY)
FIGURE 10
OSCILLATOR CONTROL LEVERS
TOP VIEW (1040+/2040+ ONLY)
FIGURE 9
CAUTION:
Do Not Move Robot
Head By Hand; Use
Oscillator Speed Knob
On Control Box
Numbered Oscillator
Positions
81
Control Lever, L
80
Control Lever
Adapter
82
Control
Lever, R
SWEEP CONTROL ADJUSTMENT
2-4
3-4
1-4
3-6
2-5
1-5 2-6
3-5
Summary of Contents for Robo-Pong 1040+
Page 27: ...TRAINING LOG 27 DATE TIME NOTES...
Page 28: ...28 DATE TIME NOTES...



































































