




























CHAPTER 2. MPO-700
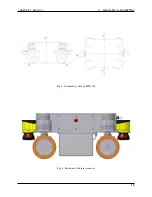
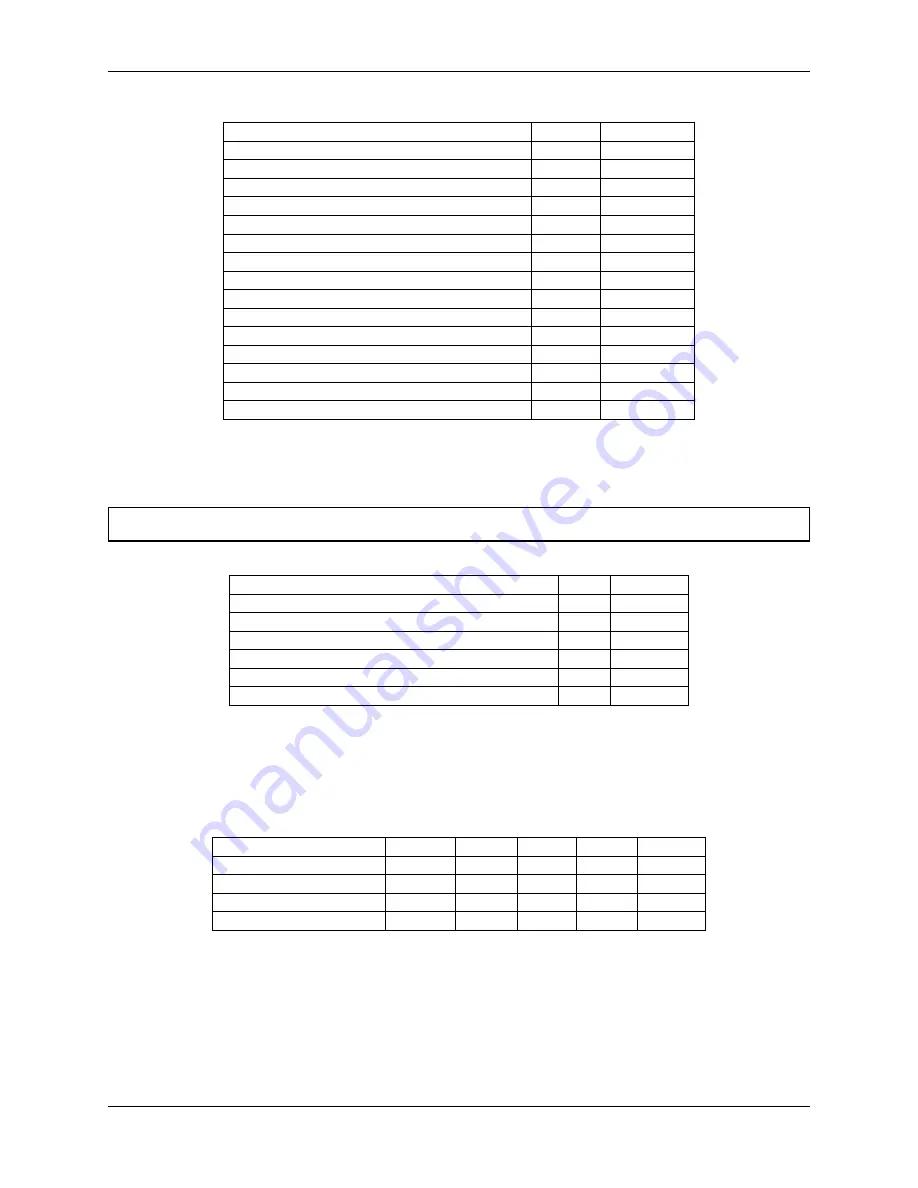
2.3. MECHANICAL PROPERTIES
Description
Symbol
Value (mm)
Width of the top plate
W1
488
Width of the Omni Drive Module configuration
W2
380
Recommended track width
W3
470
Maximum width of the platform
W4
509
Wheel eccentricity of the Omni Drive Modules
O
45
Width of the wheels
B
30
Diameter of the wheels
D
180
Length of the Omni Drive Module configuration
L1
480
Maximum length of the platform
L2
610
Overall length with one laser scanner
L3
741
Overall length with two laser scanners
L4
822
Ground clearance with battery
H1
23
Height of scan plane
H2
181
Ground clearance without battery
H3
202
Height of top plate
H4
348
2.3.2 Absolute Maximum Ratings
Warning:
Exceeding these ratings might cause malfunctions or damage the robot!
Description
Units
Value
Storage temperature
°C
-20 .. +50
Operating temperature (environmental temperature)
°C
+0 .. +35
Payload
kg
400
Maximum speed
m/s
0.9
Maximum bumpiness to pass over (
≤
0.25m/s)
mm
15
Maximum bumpiness to pass over (full speed)
mm
5
2.3.3 Positions of Sensors
All distances are in millimetres, measured relative to the platform’s coordinate system. All angles are in degrees,
measured counter-clockwise from the driving direction.
Sensor
Symbol
X-pos.
Y-pos.
Z-pos.
b-angle
Front center laser scanner
LS1
360
0
181
0
Rear center laser scanner
LS2
-360
0
181
180
Front left laser scanner
(Option)
327
277
201,5
45
Rear right laser scanner
(Option)
-327
-277
201,5
225
2.3.4 Electrical Properties and Miscellaneous Data
2.3.4.1 Properties of Internal Components
All data are taken from the respective data sheets.
14