





























493
Chapter 14
FCAN Interface Function
Preliminary User’s Manual U15839EE1V0UM00
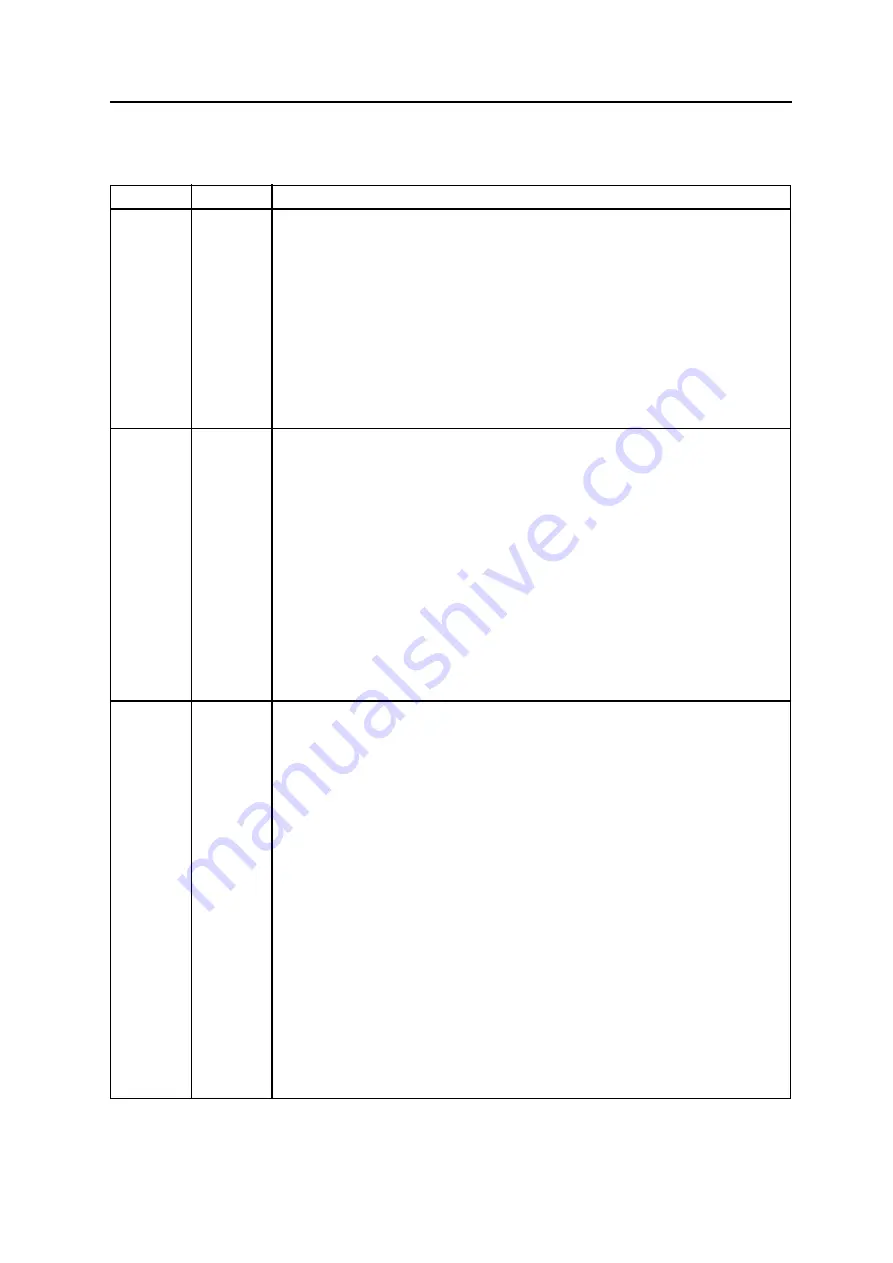
Figure 14-35:
CAN 1 to 4 Definition Registers (C1DEF to C4DEF) (2/4)
Read (1/2)
Bit Position
Bit Name
Function
7
DGM
Specifies the storage of receive message in diagnostic mode.
0: receive only and store valid message in message buffer type 7.
1: receive only and store valid message as in normal operation mode
Remarks: 1. The settings of the DGM bit are only effective in diagnostic mode
(MOM = 1). In normal operation mode (MOM = 0) the DGM bit settings
have no meaning.
2. When the “diagnostic mode” is active, a valid reception is indicated by
setting the VALID flag and depending on the setting on the setting of
the DGM flag, storing valid data either in a message buffer of buffer
type 7 or in the same way as in normal operation mode. The CAN pro-
tocol layer does not send an acknowledge, error frame or transmit
message, and also the error counter does not count.
6
MOM
Defines the module operating mode.
0: Normal operating mode
1: Diagnostic mode
Remarks: 1. The diagnostic mode provides the following functional behavior:
(a) Transmission of data frames and remote frames is not possible.
(b) No acknowledge is generated upon reception of a valid message.
(c) On reception of a valid message the VALID flag is set (1).
(d) Receive and transmit error counters remain unchanged on errors.
2. The diagnostic mode can be used for baud rate detection and diagnos-
tic purposes.
Caution:
When the diagnostic mode (MOM = 1) is defined for a CAN module,
the CxBRP register is only accessible in the initialisation state (ISTAT
= 1). While ISTAT is cleared (0) write access to the CxBRP is prohib-
ited and reading the address of the CxBRP register returns the status
of the CxDINF register.
5
SSHT
Defines the single-shot mode for a CAN module.
0: Normal operating mode
1: Single-shot mode
Remarks: 1. In single shot mode the CAN module tries to transmit a message only
once, and the TRQ flag of the corresponding message is cleared
regardless whether the transmission was successful (no error
occurred), or not.
2. In case of an error frame caused during a transmission in single-shot
mode, the CAN module does not launch a re-transmission. However,
error management according to the CAN Protocol is executed (i.e. gen-
eration of error interrupt, incrementing of error counters).
3. The CPU can switch between the normal operating mode and the sin-
gle-shot mode while the CAN module is active without causing any
error on the CAN bus.
Caution:
According to the CAN protocol upon a loss of arbitration a transmit-
ter attempts to re-transmit the message, though loss of arbitration is
not defined as an error.
When single shot mode is set (SSHT = 1), a loss of arbitration is sig-
naled by setting the BERR flag (1). Since the BERR flag signals a bus
error in normal operation, the user must check it in conjunction with
the values of the error counter, in order to judge whether it was
caused by an error or a loss of arbitration.
Summary of Contents for V850E/CA2 JUPITER
Page 6: ...6 Preliminary User s Manual U15839EE1V0UM00...
Page 20: ...20 Preliminary User s Manual U15839EE1V0UM00...
Page 32: ...32 Preliminary User s Manual U15839EE1V0UM00 MEMO...
Page 154: ...154 Preliminary User s Manual U15839EE1V0UM00 MEMO...
Page 238: ...238 Preliminary User s Manual U15839EE1V0UM00 MEMO...
Page 356: ...356 Preliminary User s Manual U15839EE1V0UM00 MEMO...
Page 522: ...522 Preliminary User s Manual U15839EE1V0UM00 MEMO...
Page 600: ...600 Preliminary User s Manual U15839EE1V0UM00 MEMO...
Page 610: ...610 Preliminary User s Manual U15839EE1V0UM00...
Page 612: ......







































































