






















Autopilot AP3003 gold Navicontrol
Instruction manual for use and installation -
rel. 1.21 / 02.08
page 22
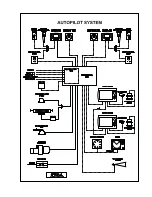
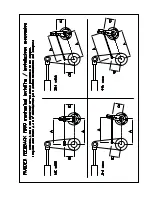
GPS and/or Chart-Plotter
In these instruments, select the output data to NMEA0183 standard (usually is the
default configuration and no manual operation is required).
Insert a course on these instruments and verify that the autopilot receives
correctly the bearing from them by placing it on NAV mode.
Obviously, in
NAV1
the autopilot will follow the course of the instrument
connected to the TB1 connector of the Processor Box, nav1 input. Same thing for
NAV2
.
Wind Direction Sensor
Verify that the sensor is connected to the TB1 connector of the Processor Box,
NAV2 input.
Select the “
NAV2 FUNCT
” on
WIND
(see the software installation procedures of
the autopilot). Select the output data to NMEA0183 standard (usually is the
default configuration and no manual operation is required) and verify that the
autopilot receives the correct bearing of the wind by pressing the
NAV
key until
WIND mode is selected.
Automatic compensation of the compass FGX90/3, FGX90N
The fluxgate compass FGX90 is already compensated at the factory and if
correctly installed on wooden, fiber glass or aluminum crafts, it does not require
further compensation.
If it is not possible to position it in an ideal location, at this stage is useful the
compensation aboard.
This autopilot allows the automatic compensation without the help of a
technician.
In fact, you only need to go out at calm sea with the vessel avoiding crowded
areas and to carry out the following operations:
1. Switch on the autopilot in STANDBY mode and make the vessel turning
slowly on circle. In order to obtain a good compensation, the maximum angular
speed must not exceed the 6 degree par second (corresponding to a complete
revolution taking 1 minute at least).
2. Press
the
STBY
key for at least 5 seconds and wait until the display
visualizes “FLUXGATE AUTOCOMP”. At this stage, release the
STBY
key.
3. Wait until the vessel has carried out a complete revolution checking always
that the angular speed is steady and under the maximum limit. If the vessel,
during this turn should rock significantly (for instance a big wave, the passage of
another vessel), repeat again the procedure.
4. Keep on turning in circle until the autopilot will display the maximum
amount of the interference and the result of the compensation: Good if
succeeded, bad if failed.
5. At this stage, the procedure is completed and you only need to press the
STBY
key in order to return to the normal functioning.