





























Chapter 5
Signal Connections
©
National Instruments Corporation
5-9
NI PCI-7342 Hardware User Manual
A typical encoder with a specification of
N
(
N
= number) lines per unit
of measure (revolutions or linear distance) produces 4
×
N
quadrature
counts per unit of measure.
The count is the basic increment of position
in National Instruments motion systems.
Note
Determine quadrature counts by multiplying the encoder resolution in encoder lines
by 4. The encoder resolution is the number of encoder lines between consecutive encoder
indexes (marker or Z-bit). If the encoder does not have an index output, the resolution is
referred to as lines per revolution, or lines per unit of measure—inch, centimeter,
millimeter, and so on.
Encoder <1..2> Index
The Index input works primarily with the Find Index function. This
function uses the number of counts per revolution, or linear distance, to
initiate a search move that locates the index position. When a valid Index
signal transition occurs during a Find Index sequence, the position of the
Index signal is captured very accurately. Use this captured position to
establish a reference zero position for absolute position control or any other
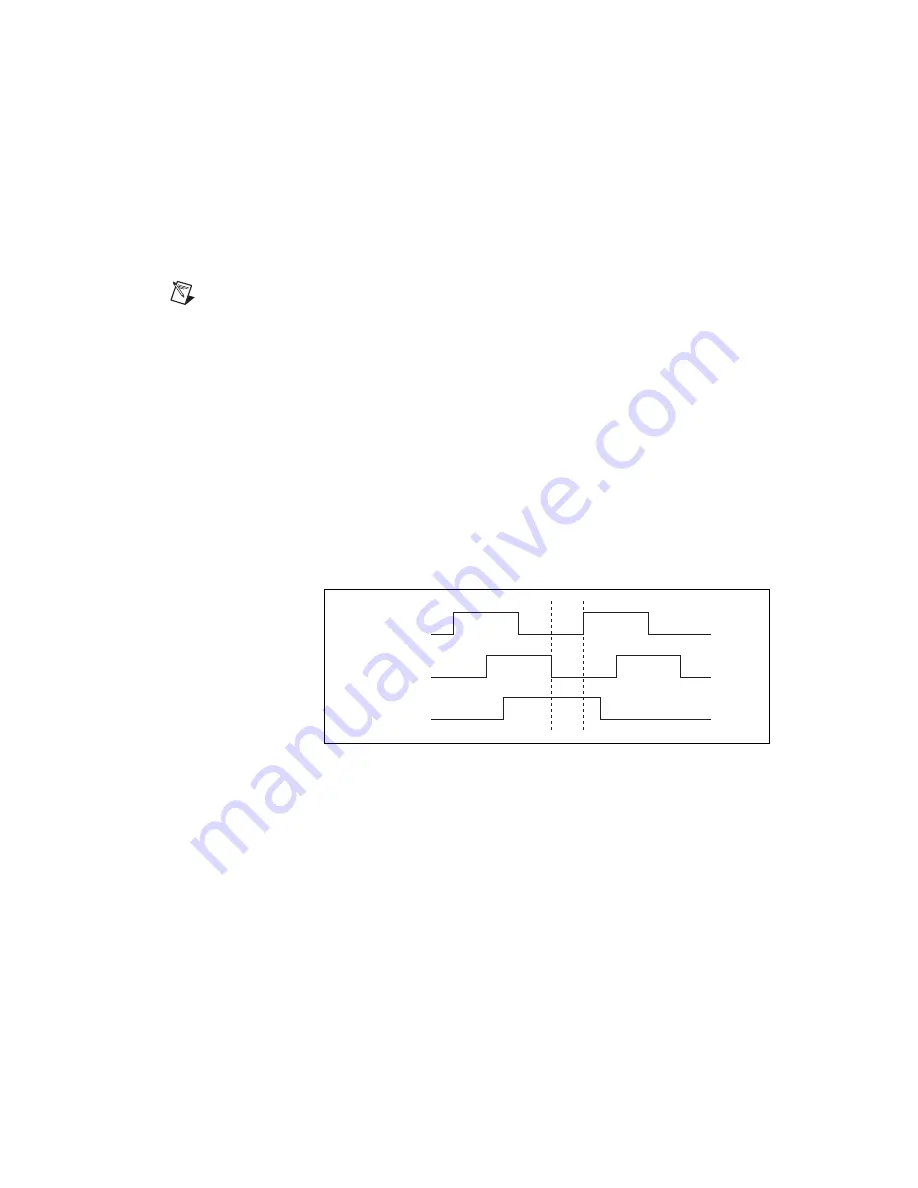
motion system position reference required. Figure 5-5 shows the
quadrature encoder phasing diagram when using a UMI or drive accessory.
Figure 5-5.
Quadrature Encoder Phasing with a UMI or Drive Accessory
Phase A
Phase B
Index







































































