























MID-7654/7652 Servo Power Motor Drive User Guide
22
ni.com
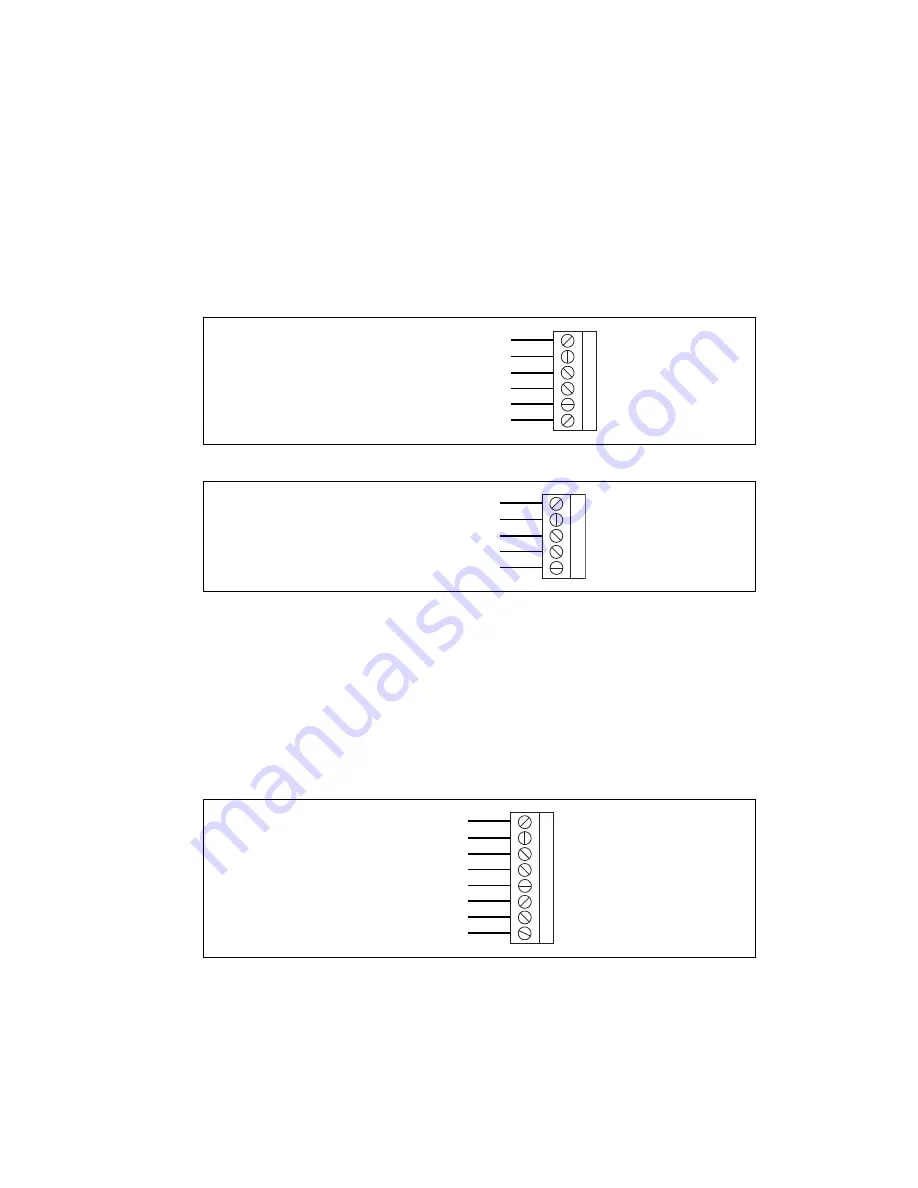
Analog I/O Terminal Blocks
The MID-7654/7652 features two analog I/O connectors.
The analog input connector uses a 6-pin removable terminal block, which provides access to
four analog-to-digital converter channels, an analog reference voltage from the converter circuit,
and an analog input ground signal.
The analog output connector uses a 5-pin removable terminal block, which provides access to
four digital-to-analog converter channels and analog output ground. Refer to Figures 19 and 20 for
terminal block pin assignments.
Figure 19.
Analog Input Terminal Block Pin Assignment
Figure 20.
Analog Output Terminal Block Pin Assignment
Step and Direction Terminal Block
The MID-7654/7652 passes step and direction signals from the controller directly through the drive,
allowing you to access them through the 8-pin removable terminal block. This feature is useful if your
system includes both stepper and servo motors, as it reduces the amount of custom cabling required to
connect your motors and drives to the controller.
To use the step and direction connector, select an unused axis on the MID-7654/7652 and connect the
step and direction outputs for that axis to your stepper drive. Refer to Figure 21 for the terminal block
pin assignments. Connect additional signals for the axis, such as inhibit outputs, limit switches,
breakpoints and triggers, and encoder feedback, as described earlier in this guide.
Figure 21.
Step and Direction Terminal Block Pin Assignment
1
2
3
4
5
6
Analog Input 1
Analog Input 2
Analog Input 4
Analog Input Ground
Analog Input 3
Analog Reference (Output)
1
2
3
4
5
Analog Output 1
Analog Output 2
Analog Output 4
Analog Output 3
Analog Output Ground
1
2
3
4
5
6
7
8
Step 1
Direction 1
Direction 2
Direction 3
Step 2
Step 3
Direction 4
Step 4







































































