
















16
|
ni.com
|
NI 9503 C Series Stepper Drive Modules and SoftMotion Module
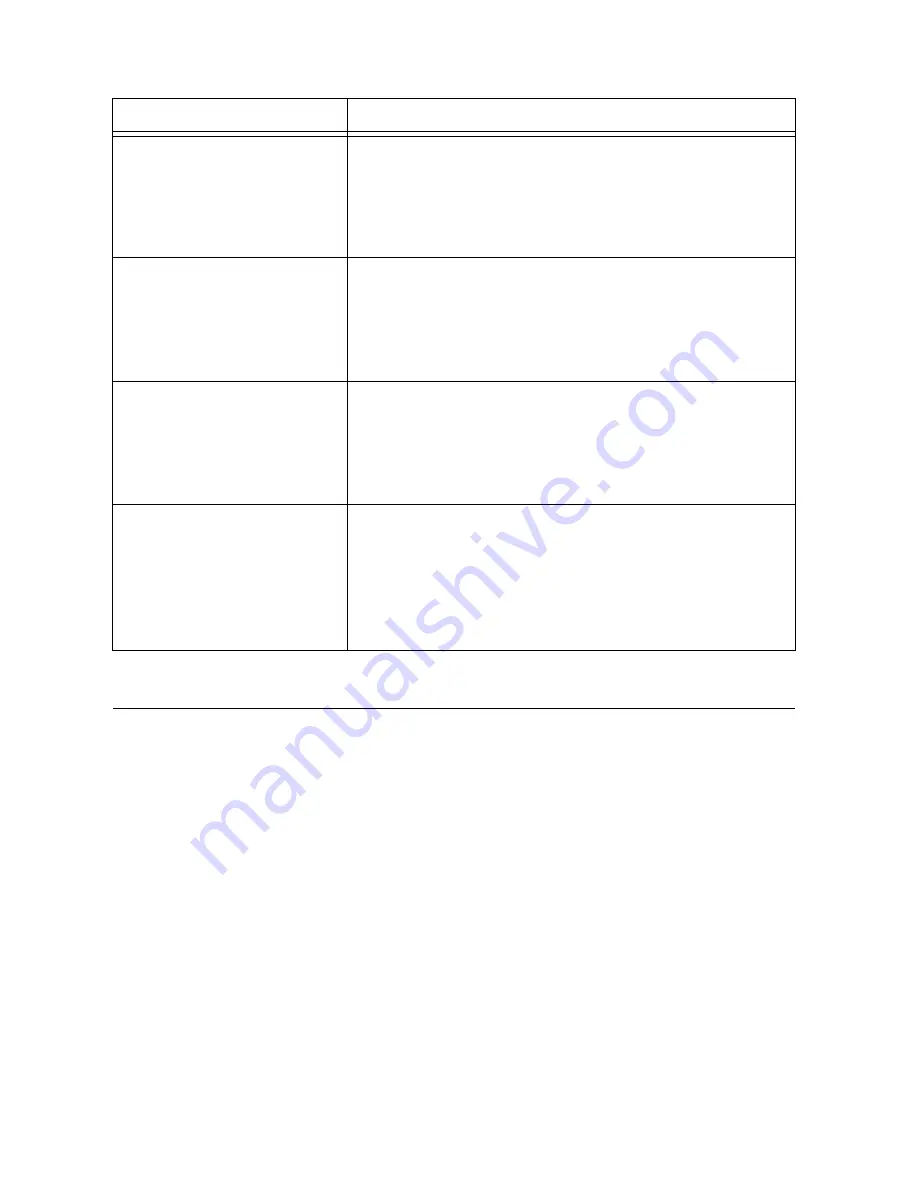
Table 10.
Stepper Drive (with Encoder) Additional FPGA Loop Descriptions
Tips and Trou
b
leshooting
Drive Fault on Ena
b
le
If you receive fault 7180 when you enable the NI 9503, verify that the
Rated Phase Current
setting is set to the appropriate value for your motor in Amps/Phase. Refer to Table 2 for
information about how to determine this value.
Complete the following steps to correct the setting:
1.
Set the
Rated Phase Current
in the
Axis Configuration
dialog box and click
OK
when
you are done.
2.
Right-click the axis in the
Project Explorer
window and select
Deploy
from the shortcut
menu to deploy the updated setting.
Table 11.
FPGA Loop Name
Description
Position Loop
When used with encoder feedback, the Position Loop
calculates interpolated positions, filters the encoder velocity
using the user-specified filter settings, and returns the
feedback position and filtered velocity feedback
information to the SoftMotion Engine.
Encoder Loop
The encoder loop uses the signals from the NI 9411 module
to generate position and velocity feedback. Position Capture
operations are included in the encoder loop to perform the
Index capture operation for use with the SoftMotion Find
Index routine.
DIO Config (Port A)
The DIO Config Port A loop manages the DIO contained in
DIO Port A. This includes the Forward Limit, Reverse
Limit, Home Switch, and Digital Inputs 0 though 3 from the
NI 9423 C Series module, and Digital Outputs 0 through 3
that are sent to the NI 9472 C Series module.
DIO Config (Port B)
The DIO Config Port B loop manages the DIO contained in
DIO Port B. This includes the Position Capture Input and
Position Compare Output from the NI 9401 C Series
module, Digital Inputs 4 though 7 from the NI 9423 C
Series module, and Digital Outputs 4 through 7 that are sent
to the NI 9472 C Series module.







































































