

















MR76 77GHz MMW Radar User Manual
MR76(v1.1)2020-3-10
Hunan Nanoradar Science and Technology Co., Ltd
21
the underlying protocol.
8.2 CAN bus features:
(1) There is no master-slave relationship in data communication. Any node can initiate data
communication to any other node(s). The order of communication is determined by the priority order of
each node information. The high-priority node information is communicated at 134μs. ;
(2) When multiple nodes initiate communication at the same time, the lower priority will give way to the
high priority , which can avoid congestion on the communication line;
(3) The communication distance can be up to 10KM (the rate is lower than 5Kbps) and the rate can reach
1Mbps (communication distance is less than 40M);
(4) CAN bus transmission medium can be twisted pair, coaxial cable. CAN bus is suitable for large data
volume short-distance communication or small data volume long-distance communication in real-time
or case like multi-master multi-ordinary or each node is used in the same field.
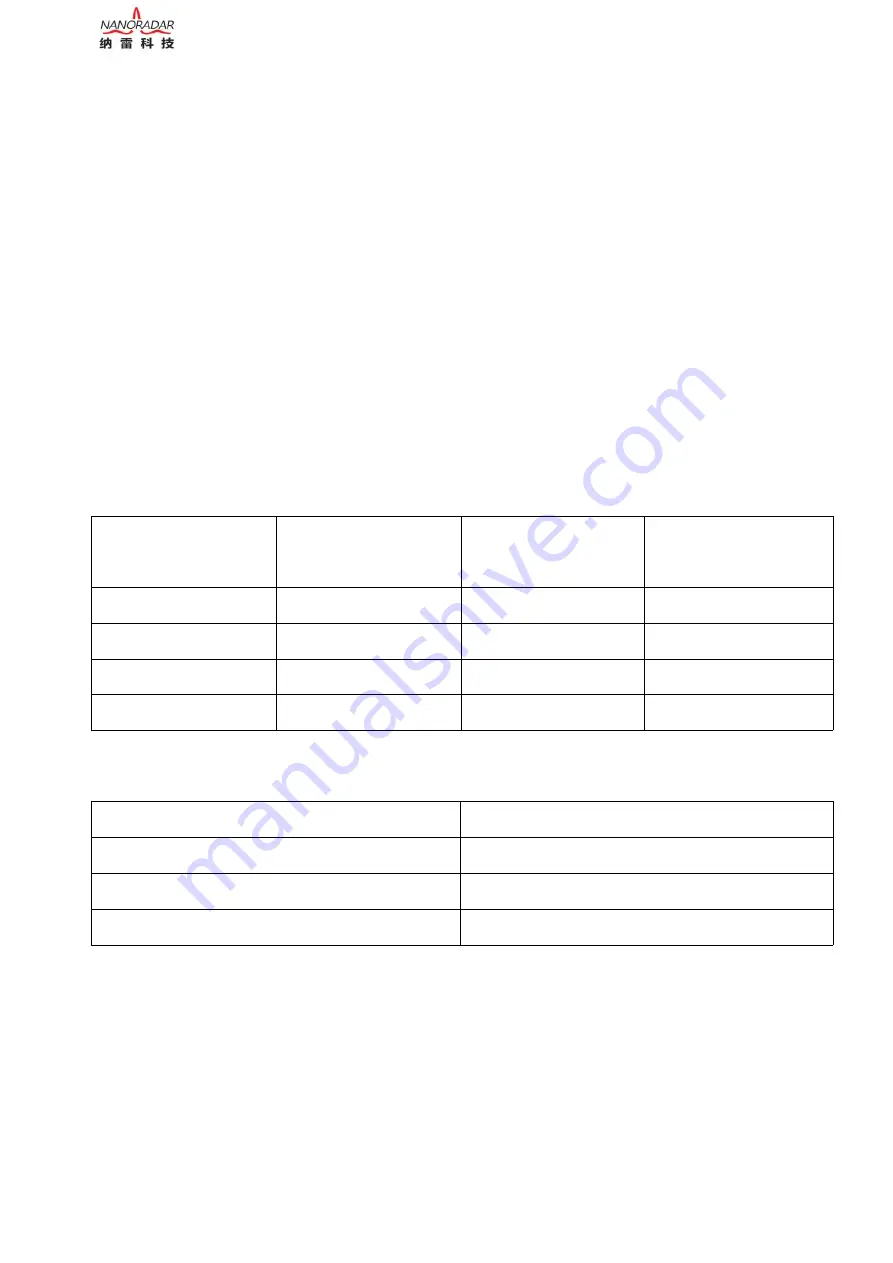
Table 7 Line Specification
Line length
Max. transfer rate
Specific line
resistance
Cable cross section
0-40m
1Mbit/s
70mΩ/m
0.25-0.34mm
2
40-300m
200Kbit/s
<
60mΩ/m
0.34-0.60mm
2
300-600m
100Kbit/s
<
40mΩ/m
0.50-0.75mm
2
600-1000m
50Kbit/s
<
26mΩ/m
0.75-0.80mm
2
Table 6.2 Protective measures
Condition
Protection
Inverse-polarity protection
Input resistance (differential)
>
19kOhm
CAN pin short-circuit current limiter
200mA
8.3 Input Signals- Possible Dynamic Parameters
Required signal quality depends on expected sensor performance and need to be tested by the customer.
9. Device Dimensions
For automotive applications the device needs to be integrated in the front end of the vehicle.
9.1 Dimensions