





























ID
Index Name
Unit Description
2842
0
HYD_State
Hydraulic: Status of the control functions
Table 7.64: “Hydraulic - Status word” parameters
7.11.6.2 Servo pump speed ramps
These settings are active and have priority for every control mode.
Pump acceleration (max. acceleration = 0 = default = without a limit)
ID
Index Name
Unit
Description
2855
HYD_PumpAcc
Hydraulic: Acceleration of the pump speed
2855
0 to 15 HYD_PumpAcc
rpm/s
Table 7.65: “Hydraulic - Pump acceleration” parameters
Pump deceleration (max. acceleration = 0 = default = jump)
ID
Index Name
Unit
Description
2856
HYD_PumpDec
Hydraulic: Deceleration of the pump speed
2856
0 to 15 HYD_PumpDec
rpm/s
Table 7.66: “Hydraulic - Pump deceleration” parameters
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
193
7 Control
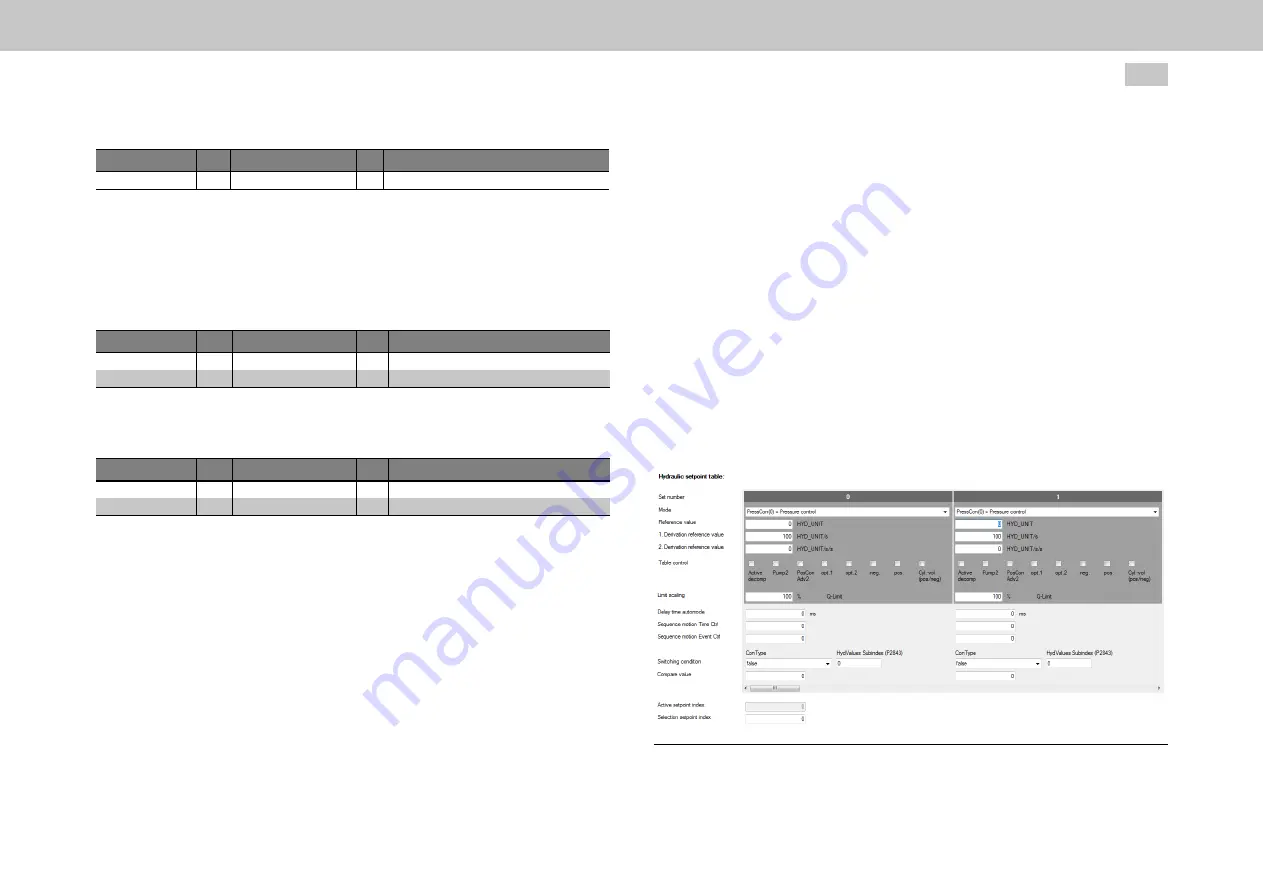
7.11.6.3 Hydraulic motion block table
The motion block table contains 16 motion blocks which can be parametrized (Index
0 to 15). The control mode, reference values and ramps as well as the valve
positions and switching conditions can be specified in each motion block.
If the servo drive is to be used as a stand-alone device, it is possible to set up a type
of sequence control using the motion block table. To activate the transition of the
motion block via the motion block table, the operating mode Tab(2) must be selected
in the motion profile P 2862[0] - HYD_OpMode. This allows switching between the
motion blocks to be control by either timing or an event. This function is enabled in
the Tab(2) operation mode.
As an option, it is also possible to use operation mode CTRL2 to switch the motion
blocks via a higher-order control system. These can be configured in advance for
different control tasks so that during the process only setpoints and the respective
table index must be selected or specified by the control system.
Image 7.66: “Hydraulic motion block table” screen







































































