





























8.11.4 Master configuration
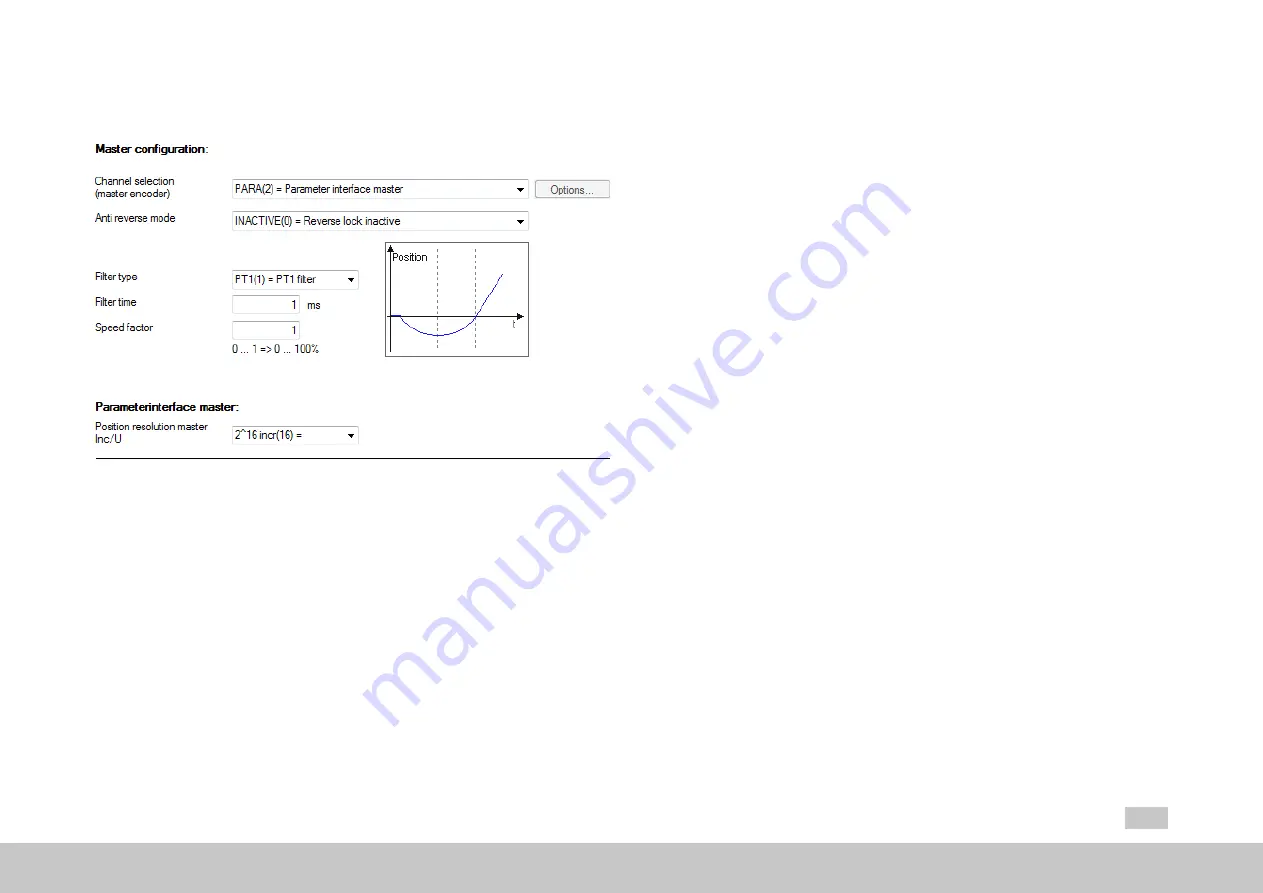
Fig. 8.72: “Master configuration” screen
Channel selection (master encoder)
P 1319[0] - MPRO_ECAM_CamMaster_AxisType is used to define the master
encoder.
NO AXIS (0) = No axis
VIRTUAL MASTER (1) = Virtual master
If you select this function, you will be able to configure additional settings by
clicking on the enabled “Options...” button (
PARA (2) = Master parameter interface
If you select this function because a higher-level controller is being used as
MOOG
ID
No.:
CB40859-001
Date:
02/2018
MSD
Servo
Drive -
Device
Help
2
2
2
8 Motion profile
the master encoder, you will need to set the resolution relative to a single
motor revolution in
P 250 - MPRO_ECAM_PARAMaster_Amplitude
(see
below).
ENC CH1 (3) = Encoder channel 1 X7 (Sin/Cos)
ENC CH2 (4) = Encoder channel 2 X6 (resolver)
ENC CH3 (5) = Encoder channel 3 X8 (optional)
This function will only be available if there is an X8 external interface
(optional module) available.
TP0 (6) = Pulse counter on probe channel 0 (TP0)
TP1 (7) = Pulse counter on probe channel 1 (TP1)
ENC_CH4 (8) = Encoder channel 4 (e.g. fieldbus)
TWIN_POS (9) = TWIN remote reference position (
P-2607
)







































































